[CMT_PosGen] [难易级别-标准]
1. 功能块功能描述
在一些运动控制的应用中,需要把位置环控制做在CPU中,这时候就需要生成实时的设定位置,使用CMT_PosGen库可以完成此功能。
可以根据输入的速度、加速度参数产生实时的设定位置。支持正转、反转、绝对值运动、相对值运动、寻参和停止共6个命令。
2. 功能块软件配置信息
AS版本 |
AS3.0.90 |
操作系统版本 |
V4.00 |
伺服操作系统版本 |
|
需要库 |
|
||||
编写人 |
刘柏严 |
测试人 |
穆珊珊 |
审核人 |
|
项目名称 |
CMT_PosGen |
||||
任务说明 |
设定位置发生器 |
||||
3. 版本信息
软件版本 |
修改内容 |
修改人 |
V1.00 |
创建 |
刘柏严 |
V1.01 |
修改关于Status的bug |
|
4. 数据交换
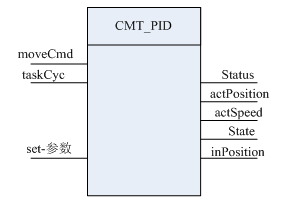
输入输出接口说明:
I/O |
类型 |
名称 |
描述 |
In |
DINT |
moveCmd |
运动命令。1:正转;2:反转;3:绝对值运动;4:相对值运动;5:寻参;6:停止 |
In |
DINT |
taskCyc |
任务周期,单位:微秒 |
In |
DINT |
setAbsPosition |
绝对值运动的设定位置 |
In |
DINT |
setRelPosition |
相对值运动的设定位置 |
In |
DINT |
setHomePosition |
寻参的设定位置 |
In |
DINT |
setPosSpeed |
正向运动的设定速度 |
In |
DINT |
setNegSpeed |
反向运动的设定速度 |
In |
DINT |
setAccPos |
正向运动的设定加速度 |
In |
DINT |
setDecPos |
正向运动的设定减速度 |
In |
DINT |
setAccNeg |
反向运动的设定加速度 |
In |
DINT |
setDecNeg |
反向运动的设定减速度 |
Out |
DINT |
status |
当前工作状态。0表示无错误。 |
Out |
DINT |
actPosition |
当前的设定位置 |
Out |
DINT |
actSpeed |
当前的设定速度 |
Out |
USINT |
state |
当前状态 |
Out |
USINT |
inPosition |
到达位置的标志位 |
常量说明:
类型 |
名称 |
值 |
描述 |
USINT |
CMT_POSGEN_CMD_POS_MOVE |
1 |
正转 |
USINT |
CMT_POSGEN_CMD_NEG_MOVE |
2 |
反转 |
USINT |
CMT_POSGEN_CMD_ABS_MOVE |
3 |
绝对值运动 |
USINT |
CMT_POSGEN_CMD_ REL_MOVE |
4 |
相对值运动 |
USINT |
CMT_POSGEN_CMD_HOMING |
5 |
寻参 |
USINT |
CMT_POSGEN_CMD_STOP |
6 |
停止 |
5.功能块使用说明(如何在新的项目中使用step by step)
步骤 |
说明 |
操作方法 |
1 |
添加CMT_PosGen库 |
按添加“已存在的库”的方式添加库 |
2 |
程序中调用 |
|
6. 调试注意
▪正确填写taskCyc这个参数。
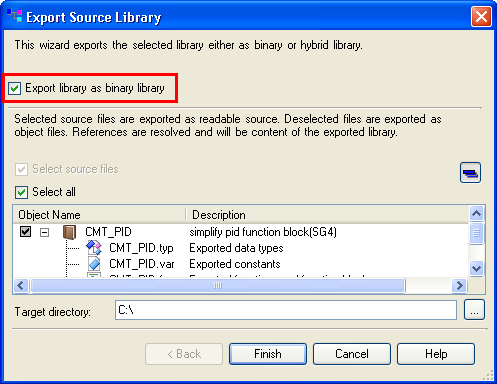
▪如果项目要给客户的话,建议使用不带源码的二进制库。
7. 报警代码(本功能块的报警)
报警号 |
常量定义 |
故障描述 |
1 |
CMT_POSGEN_ERROR_CYCLE |
任务循环周期设置错误:0<taskCyc<=1000000 |
|
|
|