4.模块接口
控制结构体
结构名称 |
子结构及变量名称 |
类型 |
描述 |
Axis_typ |
|
|
模块程序接口 |
|
cmd |
servoCmd_typ |
轴控命令结构 |
|
para |
servoPara_typ |
轴参数配置结构 |
|
monitor |
servoMonitor_typ |
轴工作状态监控结构 |
|
axisObjName |
STRING[] |
存放轴定义名称 |
|
downParaName |
STRING[][] |
存放轴参数表名称 |
servoCmd_typ说明
I/O |
名称 |
类型 |
描述 |
In |
homing |
BOOL |
执行寻参命令 |
In |
ctrlOn |
BOOL |
执行switch on命令 |
In |
ctrlOff |
BOOL |
执行switch off命令 |
In |
stop |
BOOL |
执行运行停止命令 |
In |
emgStop |
BOOL |
执行紧急停止命令 |
In |
relMove |
BOOL |
执行相对位置移动命令 |
In |
absMove |
BOOL |
执行绝对位置移动命令 |
In |
posMove |
BOOL |
执行正向运动命令 |
In |
negMove |
BOOL |
执行反向运动命令 |
In |
posJog |
BOOL |
执行正向点动命令 |
In |
negJog |
BOOL |
执行反向点动命令 |
In |
startCAM |
BOOL |
执行进入automat命令 |
In |
restartCAM |
BOOL |
执行返回automat命令 |
In |
stopCAM |
BOOL |
执行停止automat命令 |
In |
errAck |
BOOL |
执行确认错误命令 |
servoPara_typ说明:该结构内参数需要由配方参数提供初始值;
I/O |
名称 |
类型 |
描述 |
In |
countDir |
BOOL |
方向设置 0="ncSTANDARD" ; |
In |
velPos |
DINT |
设置正向运动速度Units/s |
In |
velNeg |
DINT |
设置负向运动速度Units/s |
In |
jogVelPos |
DINT |
设置正向点动速度Units/s |
In |
jogVelNeg |
DINT |
设置反向点动速度Units/s |
In |
accPos |
DINT |
设置正向加速度Units/s |
In |
decPos |
DINT |
设置正向减速度Units/s |
In |
accNeg |
DINT |
设置负向加速度Units/s |
In |
decNeg |
DINT |
设置负向减速度Units/s |
In |
relVel |
DINT |
设置相对运动速度Units/s |
In |
relPosi |
DINT |
设置相对运动位移Units |
In |
absVel |
DINT |
设置绝对运动速度Units/s |
In |
absPosi |
DINT |
设置绝对运动位移Units/s |
In |
basisOvrd_v |
UINT |
设置速度override |
In |
basisOvrd_a |
UINT |
设置加速度overrides |
In |
homeRefPosi |
DINT |
设置寻参偏移值 |
In |
homVelSwitch |
REAL |
设置寻参速度 |
In |
homVelTrigger |
REAL |
设置寻参定位速度 |
In |
homAcc |
REAL |
设置寻参加速度 |
In |
homMode |
USINT |
设置寻参模式 |
In |
homEdgeSW |
USINT |
设置寻参信号模式 |
In |
homStartDir |
USINT |
设置寻参定位方向 |
In |
homTriggDir |
USINT |
设置寻参定位模式 |
servoMonitor_typ说明
I/O |
名称 |
类型 |
描述 |
Out |
errOutput |
BOOL |
轴出错后输出标志 |
Out |
homeRdy |
USINT |
寻参完成标志 |
Out |
ctrlRdy |
USINT |
控制器使能标志 |
Out |
inPosi |
USINT |
相对或绝对运动到位标志 |
Out |
step |
UINT |
模块程序执行步骤 |
Out |
errStep |
UINT |
指示轴报错时在哪一步骤内 |
Out |
errID |
UINT |
显示报警ID号 |
Out |
moveMode |
UINT |
运动状态显示 |
Out |
actVel |
DINT |
实际速度 |
Out |
actPosi |
DINT |
实际位置 |
Out |
axisObj |
UDINT |
存放NC manager指针地址 |
Out |
strEng |
STRING[] |
存放步骤文字说明 |
Out |
errInfo |
STRING[] |
指示非正常错误信息 |
Out |
messageText |
messageText_typ |
显示伺服状态信息 |
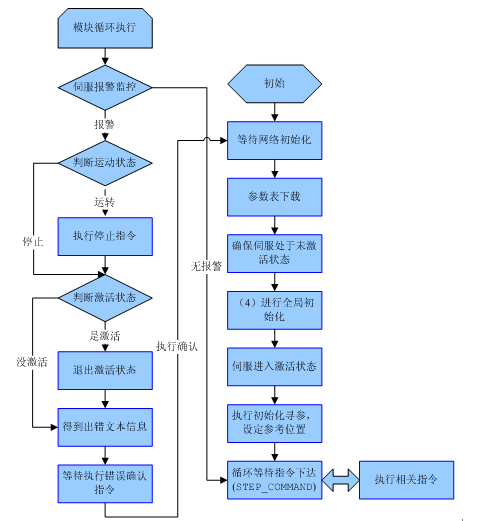
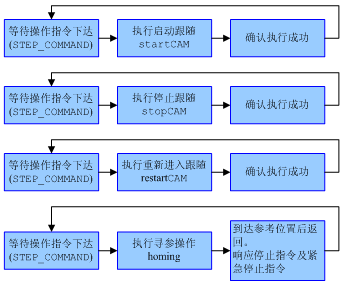
5.程序流程图
流程总图:
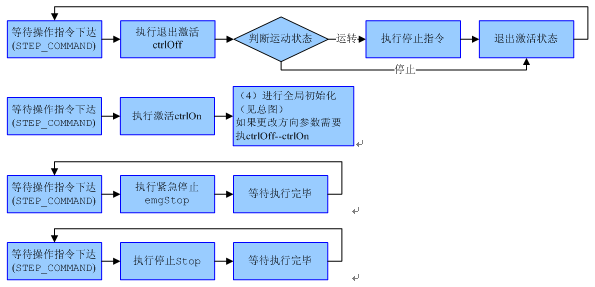
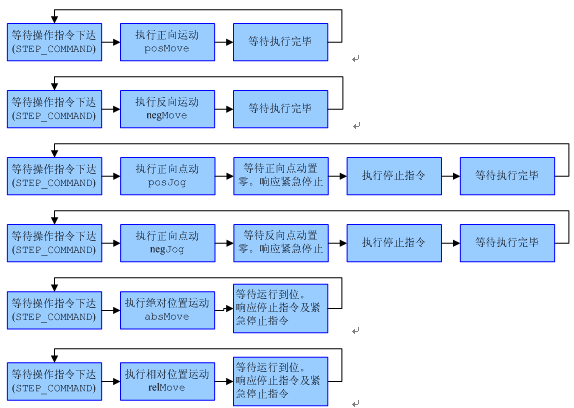
指令执行流程:
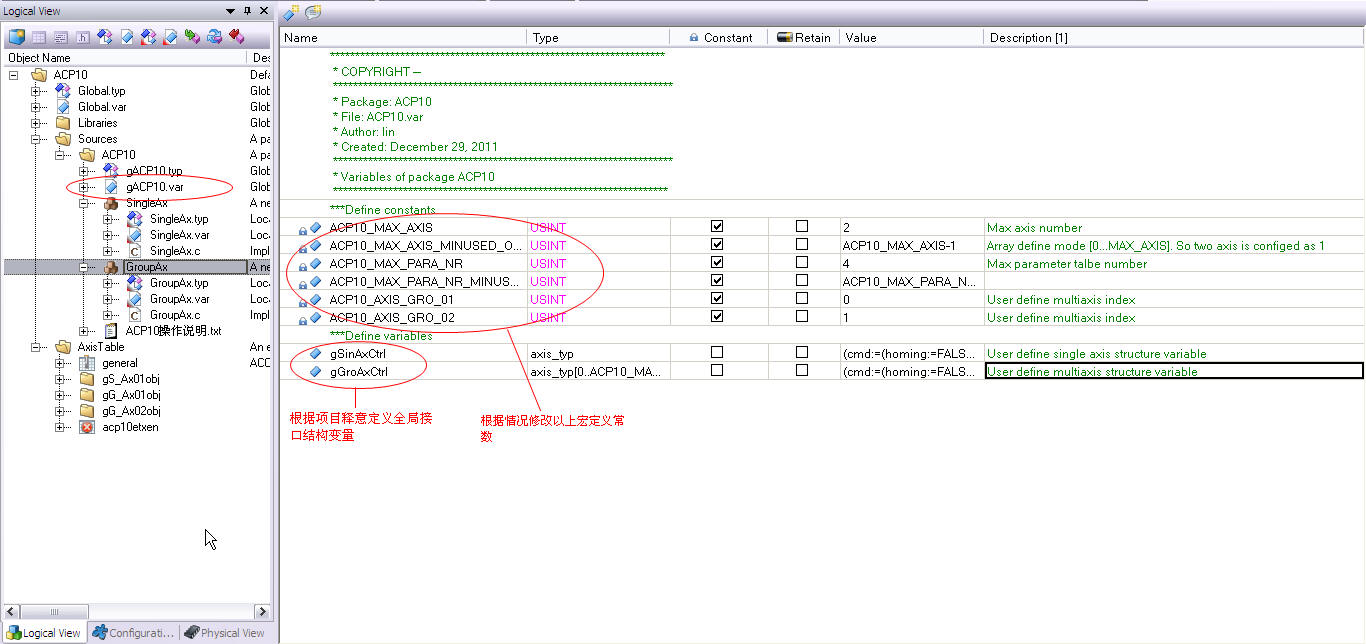
6.功能块使用说明(如何在新的项目中使用step by step)
步骤 |
说明 |
操作方法 |
1 |
导入任务 |
|
2 |
在模块程序中注释指定的数据接口更改位置,更改轴名称、更改各轴相应的parameter table名,将用户定义的模块 |
|
3 |
编译下载测试; |
|