4.模块接口
实轴主控结构体
主结构体名称 |
变量名 |
类型名 |
描述 |
multiAxis_typ |
cmd |
multiAxisCmd_typ |
轴控命令结构体 |
para |
multiAxisPara_typ |
轴控参数结构体 |
|
status |
multiAxisStatus_typ |
轴状态结构体 |
|
alarm |
multiAxisAlarm_typ |
轴报警结构体 |
multiAxisCmd_typ结构体说明
In/Out |
名称 |
类型 |
描述 |
In |
ctrlOn |
BOOL |
执行Switch On命令 |
In |
ctrlOff |
BOOL |
执行Switch Off命令 |
In |
absMove |
BOOL |
绝对运动命令 |
In |
relMove |
BOOL |
相对运动命令 |
In |
posMove |
BOOL |
正向运动命令 |
In |
negMove |
BOOL |
反向运动命令 |
In |
home |
BOOL |
轴寻参命令 |
In |
stop |
BOOL |
轴停止命令 |
In |
triggerStop |
BOOL |
轴寻trigger命令 |
In |
camStart |
BOOL |
进入Automate命令 |
In |
errorAcknowledge |
BOOL |
错误确认命令 |
multiAxisPara_typ结构体说明
In/Out |
名称 |
类型 |
描述 |
In |
velocity |
DINT |
运动速度units/s |
In |
acceleration |
DINT |
运动加速度units/s2 |
In |
deceleration |
DINT |
运动减速度units/s2 |
In |
stopDeceleration |
DINT |
停止减速度units/s2 |
In |
relPosition |
DINT |
相对运动距离units |
In |
absPosition |
DINT |
绝对运动位置units |
In |
homeMode |
DINT |
寻参模式 |
In |
homePosition |
DINT |
寻参偏移值units |
In |
homeSpeed |
DINT |
寻参速度units/s |
In |
homeAcce |
DINT |
寻参加速度units/s2 |
In |
trigStopOffset |
DINT |
triggerStop偏移值 |
multiAxisStatus_typ结构体说明
In/Out |
名称 |
类型 |
描述 |
Out |
actVelocity |
DINT |
实际速度 |
Out |
actPosition |
DINT |
实际位置 |
Out |
inPosition |
USINT |
绝相对运动完成标志 |
Out |
homeReady |
USINT |
寻参完成标志 |
Out |
ctrlReady |
USINT |
伺服switch on标志 |
Out |
moveMode |
UINT |
运动状态 |
Out |
triggerStopReady |
USINT |
triggerStop完成标志 |
Out |
Step |
UINT |
当前执行步 |
Out |
errorStep |
UINT |
错误步 |
multiAxisAlarm_typ结构体说明
In/Out |
名称 |
类型 |
描述 |
Out |
errorNumber |
UINT |
错误号 |
Out |
errorText |
STRING[79][0..3] |
错误文本 |
虚轴控制结构体类型和变量不再做详细介绍,可参照上述实轴控制相关结构体的说明。
5.功能块使用说明(如何在新的项目中使用step by step)
步骤 |
说明 |
操作方法 |
1 |
导入任务 |
|
2 |
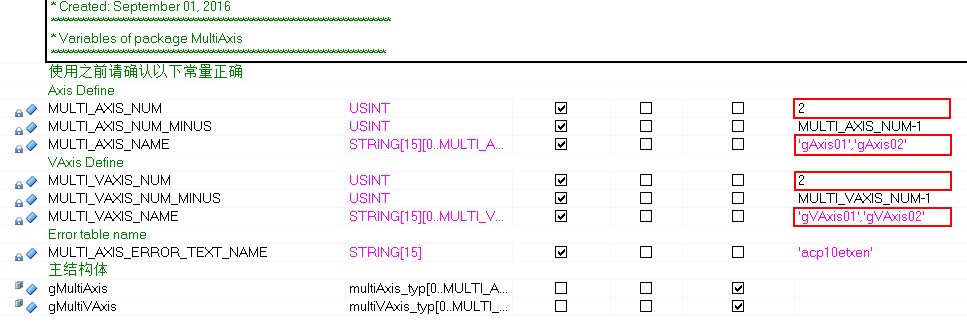
修改GlobalMultiAxis.var中常量值MULTI_AXIS_NUM、 MULTI_AXIS_NAME、 MULTI_VAXIS_NUM、 MULTI_VAXIS_NAME |
|
3 |
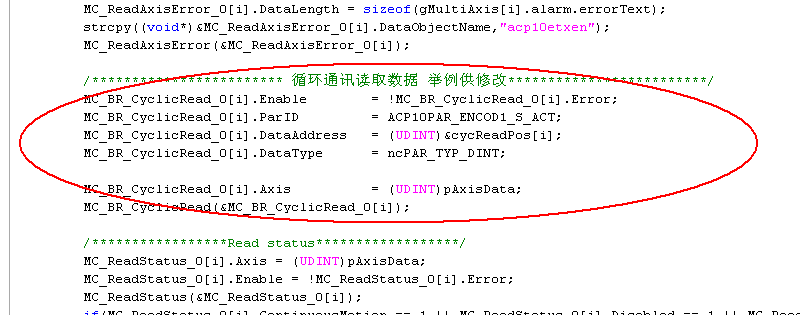
根据需要,添加循环读取数据代码 |
|
4 |
编译下载测试 |
|