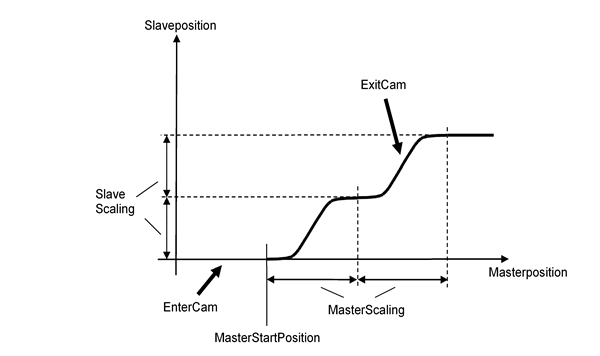
凸轮在 当前从轴位置和下一个可能的主轴起始位置 (主起始位置+n*凸轮长度)开始。在 "ExitCam "中,当前凸轮移动到终点,从轴保持在最后一个凸轮位置。这个模式只应在凸轮开始和结束时的斜率为0时使用。
mcDIRECT
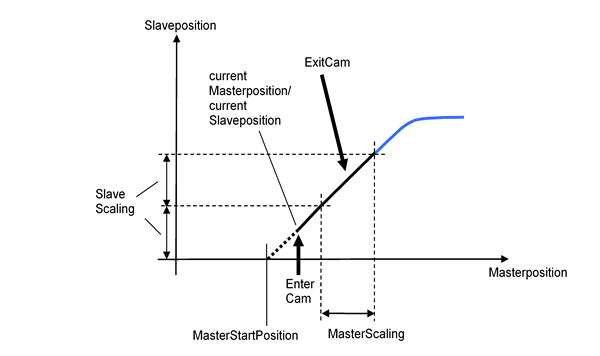
启动直接在凸轮中进行,这取决于主轴和从轴的当前位置。这个模式只能在主轴处于静止状态时进行,以避免不必要的主轴位置偏差和速度跳动。
+mcLEAD_IN (与mcDIRECT组合不可能)。
通过 "EnterCam",根据 "AdvancedParameters",在指定的凸轮之前执行一个引入补偿运动或引入凸轮运动。
+mcLEAD_OUT
使用 "ExitCam "时,根据 "AdvancedParameters",在指定的凸轮之后执行引出补偿运动或引出凸轮运动。