1. 测试目标
掉电停车是指在设备正常运行过程中,如果发生动力电断电的情况,通过大惯量主轴PID控制来保持直流母线电压稳定在设定值(750V)附近,从而保证各伺服轴之间的位置耦合关系,至到设备完全停止。
本次主要是实现设备在掉电或者拉闸的情况下,能够不断线停车!
2. 现场描述
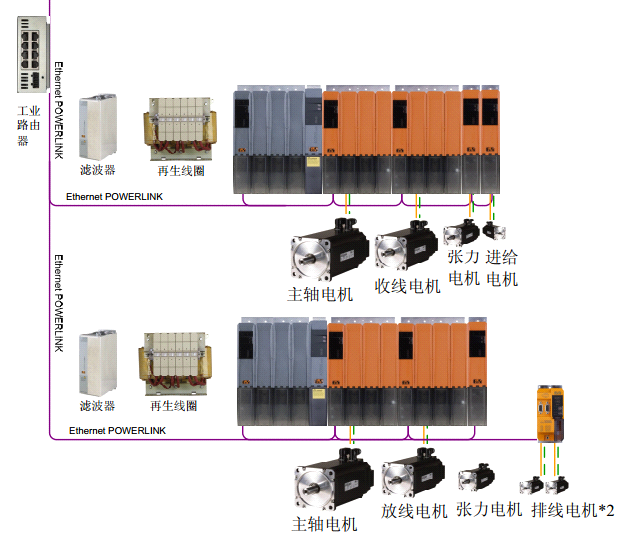
硬件拓扑图

左侧电器柜模块实际排布图(底板16槽)
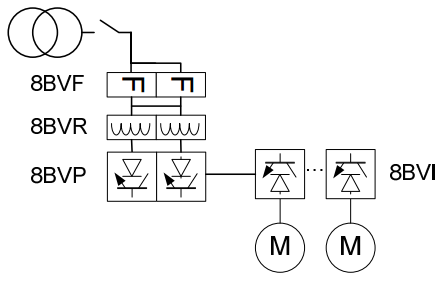
电源模块:8BVP0880HC00.000-1
辅助电源模块:8B0C0320HC00.000-1
左侧主辊(8BVI0880HCS0.000-1) --> 8KSL85.E6020C000-0
左侧线辊(8BVI0440HCS0.000-1) --> 8LSC84.R0022D000-0
左侧张力辊(8BVI0110HCS0.000-1)--> 8LSA57.DA030S00-3
双侧排线轴(8BVI0014HCD0.000-1)--> 8LSA25.D9060S00-3
剩下三个空槽位,配置三块电容模块,如下:
三个电容模块(8B0K1650HW00.000-1)

右侧电器柜模块实际排布图(底板16槽)
电源模块:8BVP0880HC00.000-1
辅助电源模块:8B0C0320HC00.000-1
右侧主辊(8BVI0880HCS0.000-1) --> 8KSL85.E6020C000-0
右侧线辊(8BVI0440HCS0.000-1) --> 8LSC84.R0022D000-0
右侧张力辊(8BVI0110HCS0.000-1)--> 8LSA57.DA030S00-3
进给轴(8BVI0028HCS0.000-1) --> 8LSA37.DB030S200-3
剩下三个空槽位,配置三块电容模块,如下:
三个电容模块(8B0K1650HW00.000-1)
3 测试过程
3.1 掉电停车实现原理
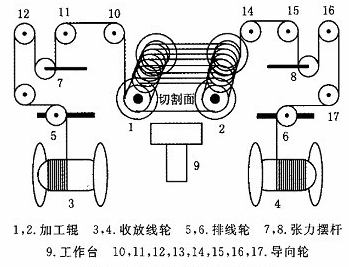
(1)设备控制原理:左侧主辊是主轴,右侧为从主辊,跟随左侧主轴,同步方式为电流同步,其余轴都是位置同步或同步控制模式。
左侧主辊为主轴,发送伺服设定位置ID428和设定电流ID213;
右侧主辊为从主轴,接受ID213-->ID713
左右线辊为跟随左侧主轴,接受左侧主轴ID428,同时通过主轴附加轴(排线位置)和从轴附加轴(张力摆杆PID)微调。同时发送ID428。
左右线辊为跟随左右线辊,接受线辊ID428。
左右张力摆杆为独立控制,没有位置耦合关系。
进给电机(工作台)为独立控制,没有位置耦合关系。
(2)掉电停车实现条件:
——需要一个大惯量的轴
——这个大惯量轴必须作为主轴,其余轴作为从轴
——主从轴需要软件配置
——必要时,需要添加电容模块
(3) 主从轴配置:
欠压限制:
Bit1|Bit0
模式UVLIM_MODE(ID368)
0 OFF
1 UDC_NOMINAL
2 UDC_BLEEDER_ON
3 0.9*UDC_NOMINAL
过压限制:
Bit8 Enable loss braking on the X5 inverter output
Bit9 Enable DC bus voltage control when power failure occurs
当STAT_UDC_POWERFAIL(ID367)检测到掉点信号后,母线电压会下降,此时掉电模式会立即把母线电压拉到设定值。
1000000001 -->0x201(513):掉电时,DC电压上限不能超过UDC_NOMINAL值
1000000010 -->0x202(514):掉电时,DC电压上限不能超过UDC_BLEEDER_ON值
主轴配置:
ID351(ERRESP_UDC_POWERFAIL)à 0
ID368(UVLIM_MODE)à 1/2/…513/514
检测掉电时(ID367=2)需要关掉位置环和速度环给定,配置如下:
ID231( PCTRL_ENABLE_PARID )à 0
ID726( SCTRL_ENABLE_PARID )à 0
适当时候可以增加扭矩限制,减轻机械冲击。
从轴配置:
ID351(ERRESP_UDC_POWERFAIL)à 0
ID368(UVLIM_MODE)à 0
3.2 调试过程
(1)测试条件:PP500、IO模块以及Hub通过UPS供电。
由于两个主轴分别位于两个不同的底板,所以进行两种测试方案,方案一,两个底板并联直流母线,方案二,两个底板独立控制。
方案一:两底板直流母线并联
——硬件需要:扩展模块(8BVE0500HC00.000-1)将两个底板连接起来。
——硬件接线:线圈和滤波器接线都需要并联在一起
——软件配置:
左侧电源轴(主轴侧):

右侧电源轴:

其中ID1278,是在电源轴没有switchon之前,需要检测两个电源模块的母线电压,求出差值填到左轴ID1278中(UDC_ACT右- UDC_ACT左)。
ID850和ID873是直流母线电压控制PID参数。
ID869是控制模式:2-->取消零序电压偏移
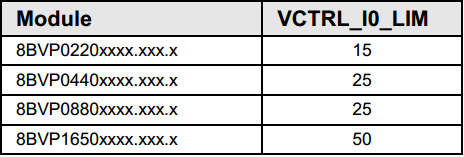
ID1279根据电源模块型号选择定制(下表)
注意:并联模式下测试,断电设备可以正常停下来,但停止后,主轴会反转一断距离(可能是由于模式控制问题,暂时没有发现原因,模式513和514都是如此)。
方案二:两底板独立控制
掉电时,取消扩展模块,两个底板独立控制,选取双主辊中的每个轴分别作为主轴,每个底板上的其余轴全是从轴。
模式采用514,测试正常!
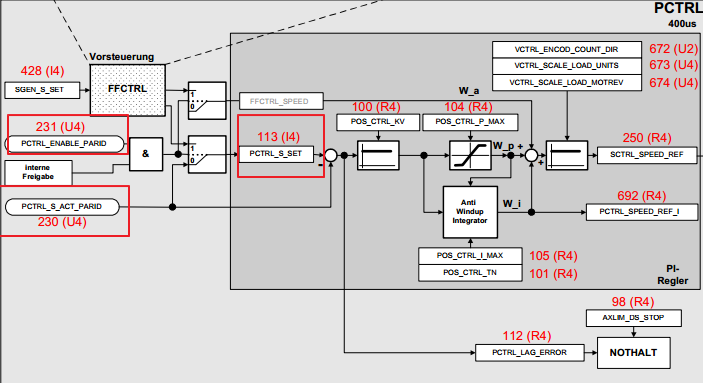
3.3 掉电过程程序处理
掉电过程,主轴位置环和速度环的使能是0,其电流环给定是靠母线电压PID输出。
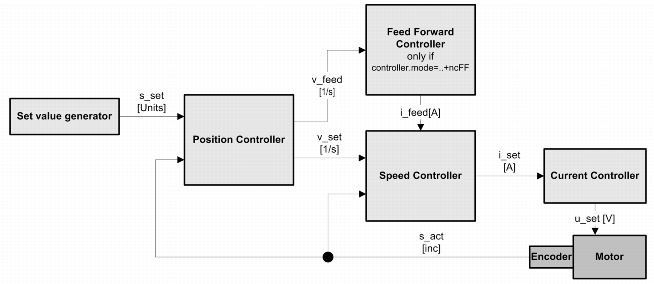
根据测试过程发现,如果从轴耦合关系是主轴的设定位置ID428,那么断电时,ID428位置会瞬间变化很大导致,线轴速度变化大,那么摆杆角度大,金刚线拉断。如果从轴耦合关系是主轴的实际位置ID111,那么断电后,设备可以正常停车,但实际位置会有波动,设备正常开启过程时,张力波动比较大,加速过程中摆杆摆动幅度大,如果从轴耦合关系是主轴的位置环设定位置ID113,那么根据下图示意,掉电时ID231-->0,ID113=ID230(ID111),那么掉电时,也可以正常停车,但由于ID428-->ID113有总线延时(T_Total),张力波动比较大,加速过程中摆杆摆动幅度大。
所以考虑断电时,通过切换从轴耦合主轴ID,尝试,设备正常!
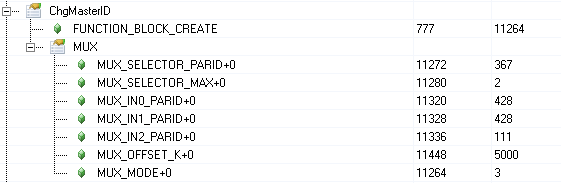
切换主轴程序如下:
4. 总结与建议
PLCopen函数(AutoControl)的使用小结:
Automat Structure -->MC_AUTDATA_TYP-->MasterParID,该参数的含义是从轴跟随主轴的参数ID,如果该参数设成0,那么默认主轴发送设定位置ID428,调用该函数时,会占用主轴ID484的发送通道;如果该参数设成除了ID428之外的其它参数ID,调用该函数时,会占用主轴ID485的发送通道。所以如果使用该函数时,注意轴与轴之间数据交换。
尝试使用MC_BR_InitMasterParIDTransfer,改变MasterParID后,也会占用ID485发送通道。
总结,如果用任意函数,改变了MasterParID,都会占用主轴的一个发送通道。