伺服Homing模式说明
版本说明:
软件版本 |
修改内容 |
修改人 |
审查人 |
V1.000 |
创建 |
刘柏严 |
|
基本参数说明 |
|
HW Position |
电机编码器位置 单位[unit] unit 表示这是标定后的数据 |
SW Position |
实际软件使用位置 单位[unit] unit 表示这是标定后的数据 |
ref_pulse |
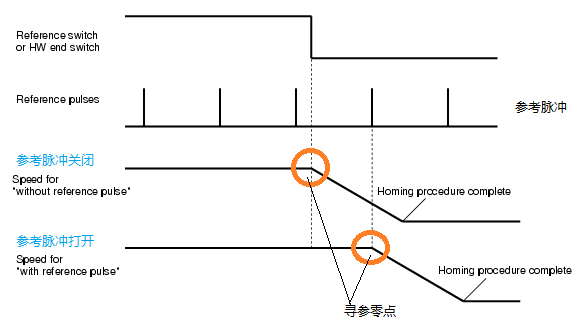
参考脉冲,电机每圈一个,把此开关打开寻参会更准确一些。因为外部trigger会有些延迟或抖动。此开关要配合有运动的寻参模式才有作用。 例如:switch_gate模式找到trigger后,如果此开关打开,那么要找到下一个参考脉冲才结束寻参。 |
寻参后位置 |
带有运动的寻参,通常参考点是零位,找到以后会根据当前设定加速度进行停止,停止后位置通常都不在零位,会有比较小的数值。这点只是帮助理解为什么执行带有运动的寻参命令后当前位置不是零。 |
寻参模式说明 |
|
注意:以下模式是B&R轴homing模式,如果使用PLCOpen会在此基础上封装,模式名称会有不同。请参考PLCOpen寻参模式。 |
|
ncDIRECT |
模式说明: 直接寻参,通常使用在不需要寻参的轴上,可以把当前位置清零。只是为了取得home ok 状态,没有什么其他作用。
参数设置: 直接寻参ref_pulse 必须为ncOFF
实际项目例如: 印刷机,收放卷,不断旋转不在意初始位置的轴。 |
ncSWITCH_GATE |
模式说明: 寻找寻参开关模式,此模式会运动寻找接近开关,实际项目中如果是单圈编码器,通常每次开机都需要寻参。如果是多圈编码器,那么在每次拆电机后寻一次就可以。寻参后停止位置取决于参数设置。 参数设置: ref_pulse为ncOFF 条件trigger满足后认为是零位,立即停止。 ref_pulse为ncON 条件trigger满足后认找到下一个参考信号再停止。
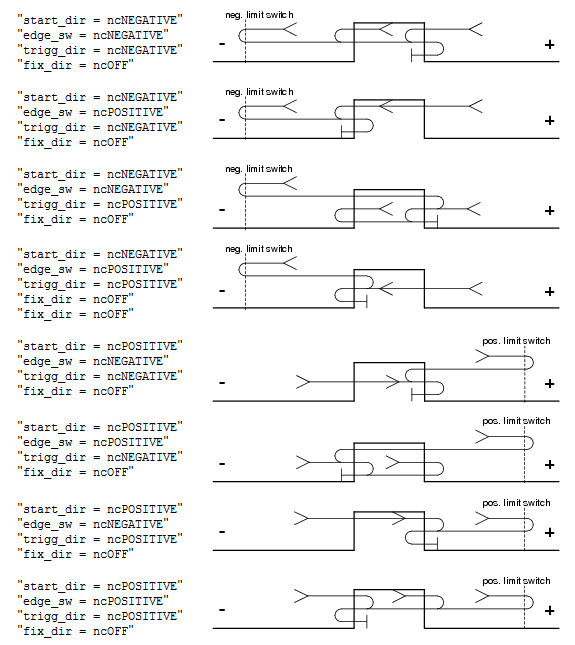
Start_dir,edge_sw,trigg_dir说明如下图: fix_dir=ncON 不建议使用。这里讲的都是针对fix_dir=ncOFF v_switch 用来寻找接近开关,可以快速找。 v_trigger找到接近开关后用这个速度找边沿,通常这个速度比较慢,这样能保证寻参准确一些,并且停止后离零位比较近。
实际项目例如: 部分包装设备,整个行程比较快速,并且可以前后运动的轴。膜包机分瓶,上膜,切刀等。 |
ncABS_SWITCH |
模式说明: 用的比较少,这里说明只是从帮助理解。 和switch_gate比较少了一个start_dir参数,其他几乎一样,如果项目是旋转轴没有limit,可以使用此模式。不过此模式应该可以被switch_gate模式替换。 参数设置: 同switch_gate 实际项目例如: --- |
ncEND_SWITCH |
模式说明: 用的比较少,这里说明只是从帮助理解。 使用limit来寻参。 参数设置:
实际项目例如: --- |
ncHOME_OFFSET |
模式说明: 当move.homing.parameter.s = 0时,可以获取当前编码器位置HW_position,通常此模式用于多圈绝对编码器第一次寻参。
多圈绝对编码器第一次寻参步骤: 1 – 手动运动或者switch_gate运动到参考点。 2 - 设置move.homing.parameter.s = 0,发送offset寻参命令。 3 – 声明一个变量offset保存当前位置 4 –设置move.homing.parameter.s = -offset,发送offset寻参命令
多圈绝对编码器第一次寻参后开机寻参步骤: 1 -设置move.homing.parameter.s = -offset,发送offset寻参命令,获取到当前位置。 2 – 发送abs_move命令到零位 (如果需要到零位,执行此步骤)
参数设置: move.homing.parameter.s 偏移量 实际项目例如: 通常用在多圈绝对编码器项目,设备行程有限,运动速度慢,或不方便开机寻参运动。 例如印刷机横向,有前后限制的直线运动。 |
ncHOME_OFFSET + ncCORRECTION |
模式说明: 没用过
|
ncDCM |
模式说明: 没用过
|
ncBLOCK_TORQUE |
模式说明: 没用过 没有接近开关,撞到机械走不动后寻参。
|