1.基本信息
编写人 |
穆珊珊 |
审核人 |
(检查,测试,注释) |
|
应用归属 |
运动控制 |
|||
软件信息 |
|
硬件信息 |
||
其他 |
|
|||
版本信息 |
修改内容 |
修改人 |
||
V1.00 |
创建 |
穆珊珊 |
||
|
|
|
||
2. 简介
PID:PID传递函数
该功能块可以创建一个可以配置的PID控制器。该控制器具有延迟和抗积分饱和功能,是以附加(并行)方式构建的。
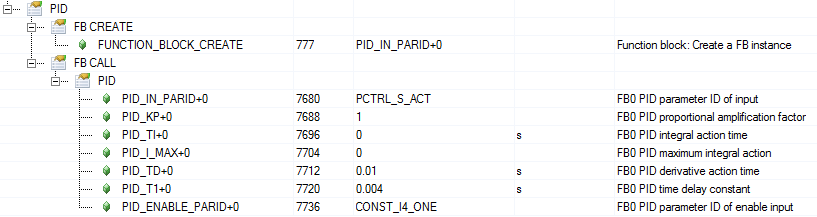
3. ParID
ParID名字 |
缩写 |
访问方式 |
数据类型 |
数据范围 |
初始值 |
单位 |
描述 |
PID_IN_PARID |
*x |
WR |
UI2 |
<ParID>,0 |
0 |
|
ParID,指向输入值 |
PID_ENABLE_PARID |
*e |
RD,WR |
UI2 |
<ParID>,0 |
0 |
|
使能ParID |
PID_KP |
p |
RD,WR |
R4 |
>=0.0 |
0.0 |
|
比例增益 |
PID_TI |
ti |
RD,WR |
R4 |
>=0.0 |
0.0 |
s |
积分时间常数 |
PID_I_MAX |
i_max |
RD,WR |
R4 |
>=0.0 |
0.0 |
|
最大积分量 |
PID_TD |
td |
RD,WR |
R4 |
>=0.0 |
0.0 |
s |
微分时间常数 |
PID_T1 |
t1 |
RD,WR |
R4 |
>=0.0 |
0.0 |
|
延迟时间 |
PID_VALUE |
y |
RD |
R4 |
|
0.0 |
|
结果 |
PID_P_VALUE |
yp |
RD |
R4 |
|
0.0 |
|
P结果 |
PID_I_VALUE |
yi |
RD |
R4 |
|
0.0 |
|
I结果 |
PID_DT1_VALUE |
ydt1 |
RD |
R4 |
|
0.0 |
|
DT1结果 |
4. 功能
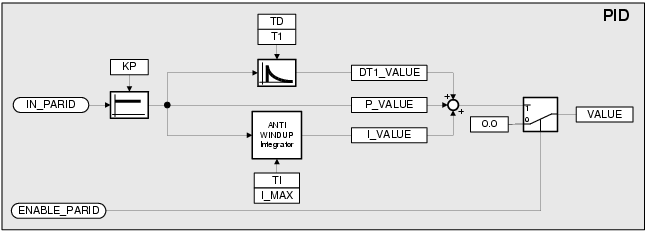
PID控制器通过使能输入端*e!=0使能。当功能块关闭后,积分部分和输出操作量y会置为0。
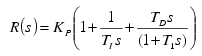
PID传递函数:
解释:
比例部分:yp = kp * x
抗积分饱和的积分部分:i_lim = MAX(i_max – abs(yp),0)
yi = MAX(MIN(yi + yp*Ta/Ti, i_lim), -i_lim)
yd = Td/Ta * (yp – yp_old)
yp_old = yp
ydt1 = (1 – Ta/T1)*ydt1 + Ta/T1*yd
y = yp +yi + ydt1
5. 例子
使用PID做微分。取PID_DT1_VALUE即是微分值。