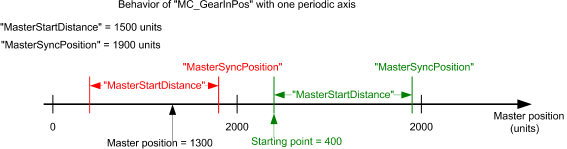
下图显示了一个周期性主轴的表现。在这个例子中,当前主轴位置等于1300 units。位置 "MasterSyncPosition - MasterStartDistance "小于1300units(1900-1500=400)。在设置 "InSync "之前,只允许主轴向正方向移动。由于这个原因,它必须在下一个周期内向正方向移动,直到位置400。然后主从轴开始补偿齿轮(补偿段),"StartSync "输出被设置(起点)。
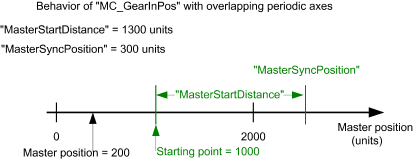
下面的例子表明,"MasterStartDistance "也可以扩展到多个周期。当前的主轴位置是200 units。位置 "MasterSyncPosition - MasterStartDistance "是-1000units(300-1300=-1000)。如果主轴正向移动到本周期的1000units到这个位置点,主从轴补偿齿轮(补偿段)开始,"StartSync "输出被设置(起始点)。当达到下个周期内 "MasterSyncPosition "时,"InSync "输出被设置。