步骤1:确定受控系统的速度控制器
在 "ncSPEED "模式下开始识别过程。
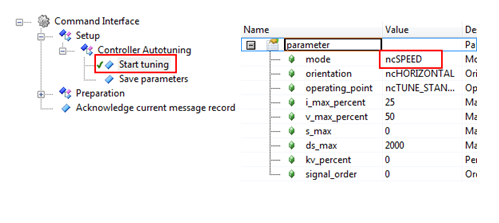
图: 用于识别受控系统的速度控制器的命令界面
SLO配置跟踪,启动整定流程,并从驱动器加载记录的数据。如果在识别过程中发生错误,会在状态栏中显示出来:
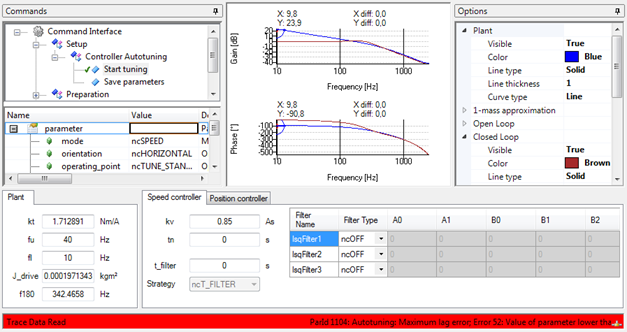
图: 状态栏中显示的识别过程中的错误
第2步:频率响应的解释说明
成功识别后,受控系统的频率响应显示在波德图中:
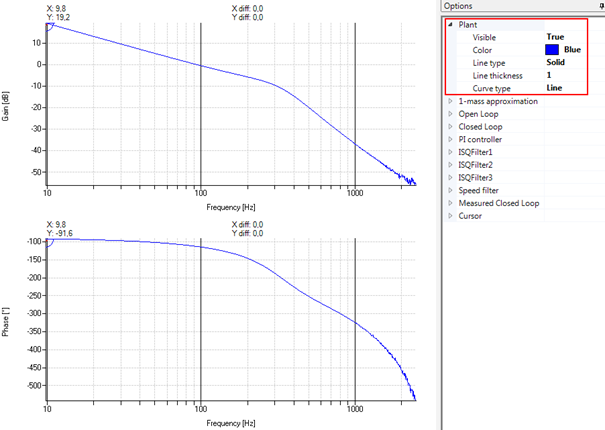
图: 频率响应的识别
在这个频率响应中没有可识别的共振和反共振("理想的 "驱动)。相位交叉频率(f180)约为274 Hz。
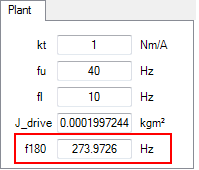
图: 显示相位交叉频率
此外,还可以在频域中为计算总惯性矩(J_drive)指定一个估计值(fu,fl),例如从10 - 40 Hz。
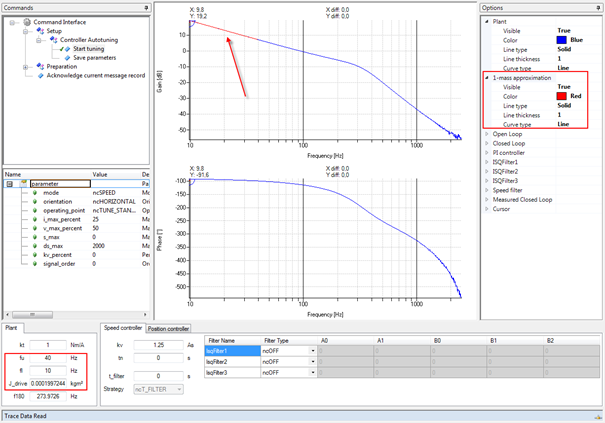
图: 显示总惯性矩的估计值
第3步:评估标准配置
SLO计算出一个增益,从而形成一个足够稳定的速度控制回路:
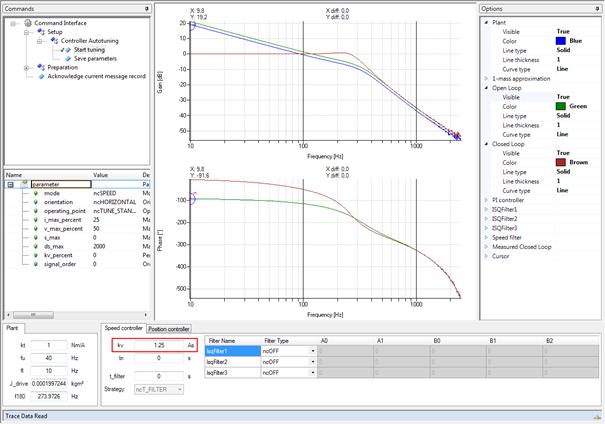
图: 对标准配置的评估
闭合环路的波德图显示,图中 闭合环路的设计规范所要求的特性得到了满足,因此不需要额外的滤波器。
第4步:确定闭合速度控制回路
在 "ncTEST_SPEED "模式下启动识别过程:
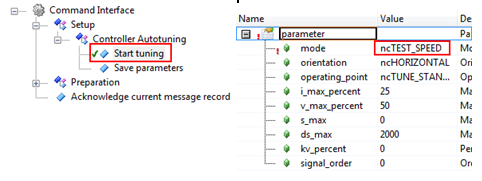
图: 用于识别闭合速度控制回路的命令界面
SLO初始化速度控制器参数,配置跟踪,启动识别程序,并从驱动器加载记录数据。计算出的闭合速度控制回路的频率响应显示在波德图中。
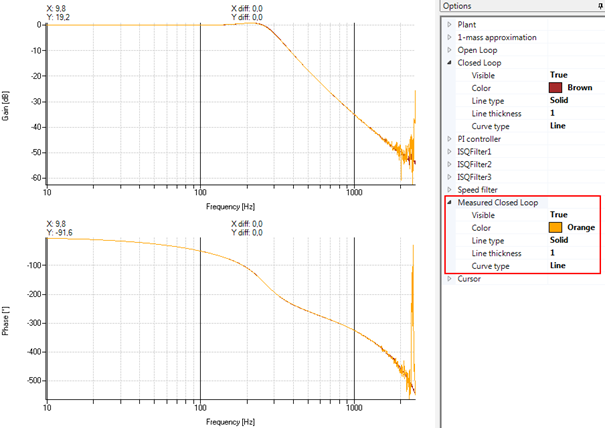
图: 计算和测量的速度控制回路的比较
由于计算的频率响应与测量的频率响应相匹配,控制器的参数被正确初始化。
速度控制回路的带宽可以通过将光标贴在被测量的闭合回路的图形上来显示:
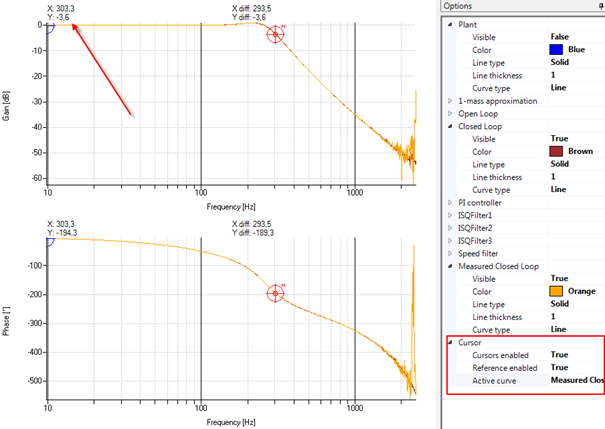
图: 确定速度控制回路的带宽
在这种情况下,303.3Hz的数值会导致大约-3.6dB。
第5步:识别受控系统的位置控制器
在 "ncPOSITION "模式下开始识别过程:
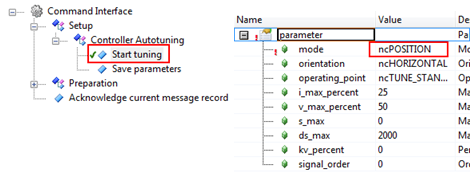
图: 用于识别受控系统的位置控制器的命令界面
SLO配置跟踪,启动识别程序,并从驱动器加载记录数据。
第6步:评估标准配置
SLO计算出一个增益,从而形成一个足够稳定的位置控制回路:
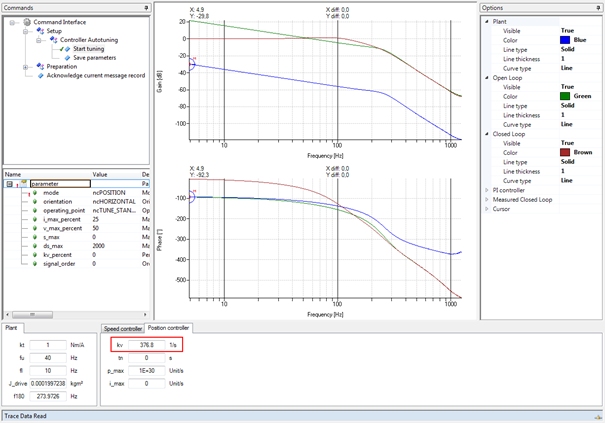
图:对标准配置的评估
闭合环路的波德图显示,图中闭合环路的设计规范所要求的特性得到了满足。
第7步:确定闭环位置控制回路
在 "ncTEST_POSITION "模式下开始识别过程:
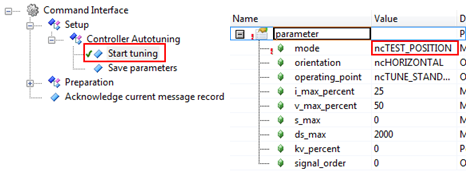
图: 用于识别闭环位置控制回路的命令界面
SLO初始化位置控制器参数,配置跟踪,启动识别程序并加载驱动器的记录数据。计算出的闭环速度控制回路的频率响应显示在波德图中。

图: 计算和测量的位置控制回路的比较
由于计算的频率响应与测量的频率响应相吻合,控制器的参数被正确初始化。位置控制回路的带宽可以指定为大约150Hz。