伺服回路优化 (SLO) 提供了一种借助频率响应来配置伺服驱动器控制器的方法。
SLO是基于 控制器的设置(自动整定),但提供了微调计算设置的能力,并通过测量检查其效果。
其用户界面分为以下几个部分:
点击图片中嵌入的热点,可以打开有关该主题的额外信息。
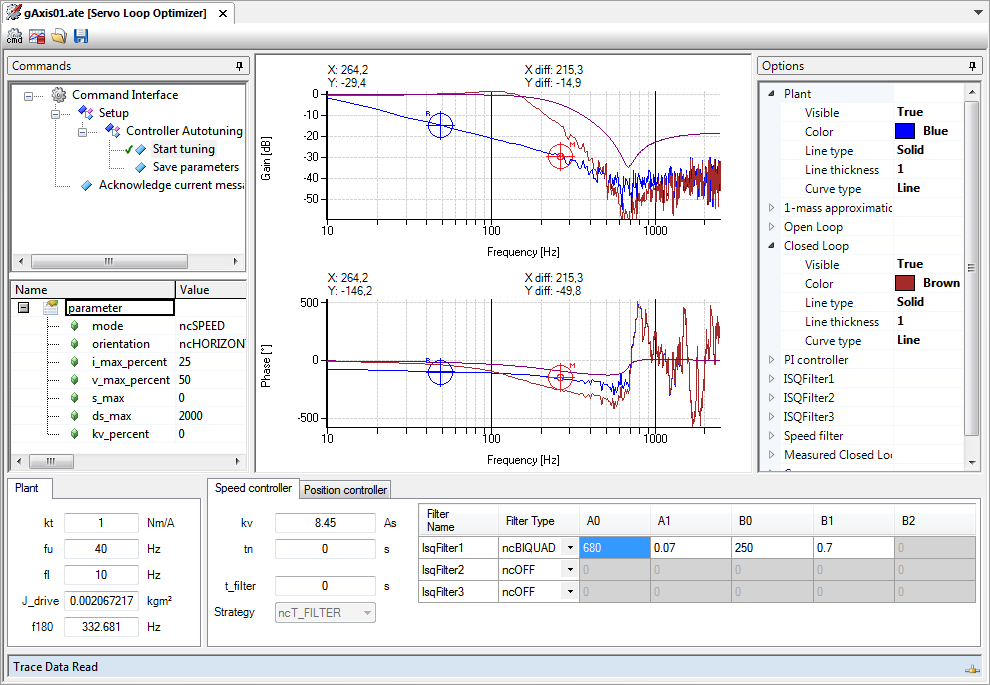
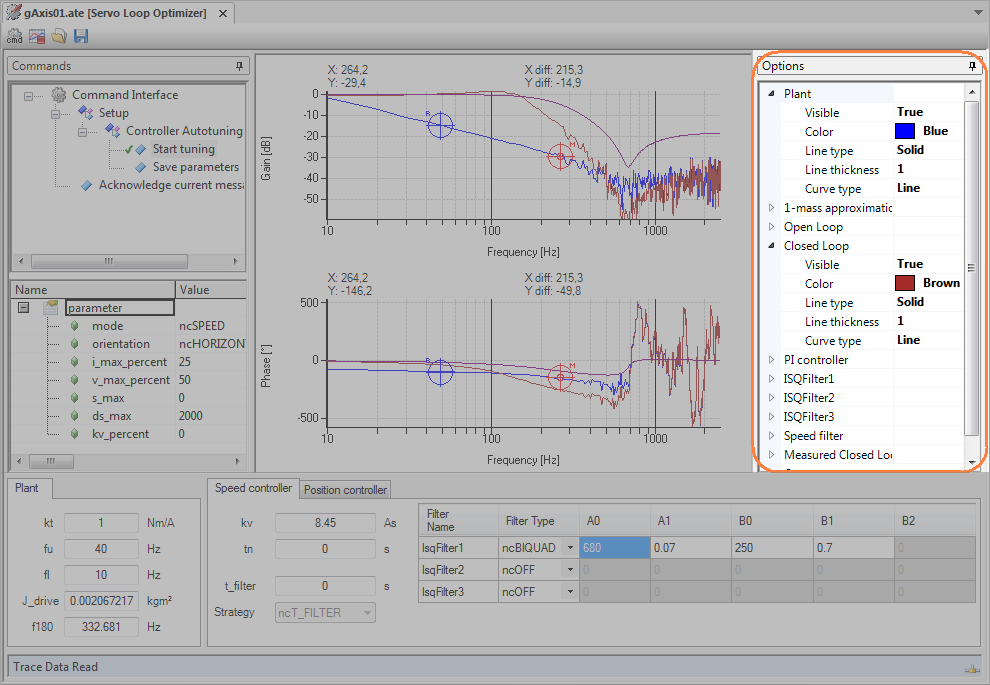
命令窗口是用来控制轴的。
这些图标可以用来发布命令和加载跟踪数据。
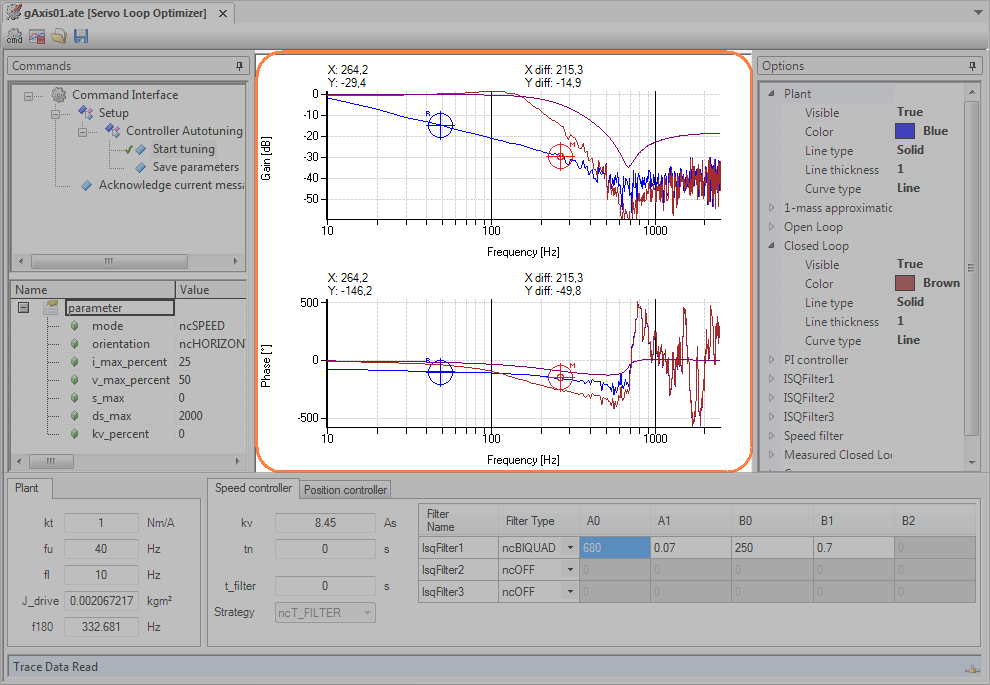
图示窗口是显示记录数据的地方。
选项窗口中的设置会影响图表窗口中的外观。
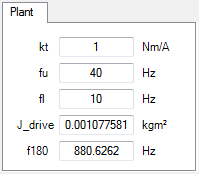
这里可以确定控制对象的参数。
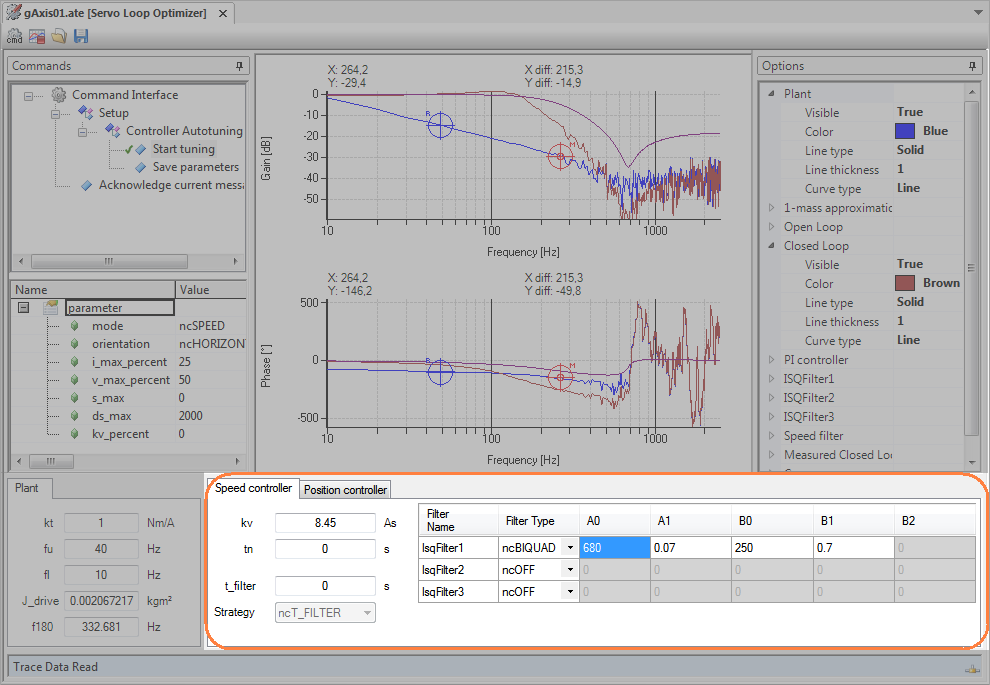
控制器的设置可以在控制器设置区进行。
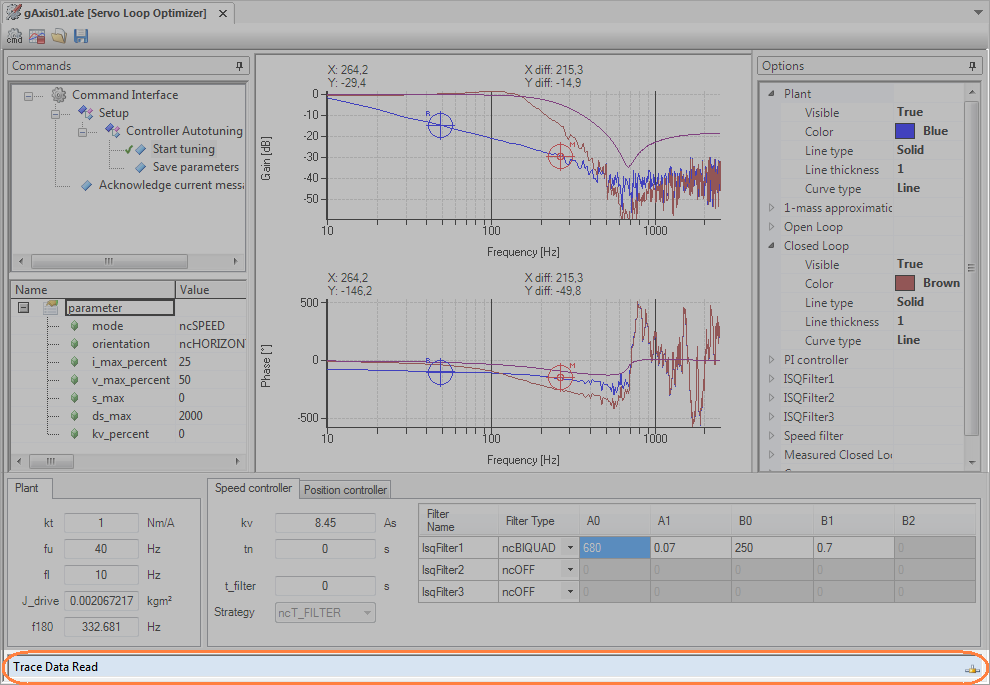
状态栏显示伺服回路优化的当前状态。
整定步骤
假设整定至少已经达到了可以启动控制器的程度,由于控制器的级联结构,建议采用以下顺序:
1.)速度控制器的参数配置
2.)测量闭合的速度控制回路
3.)位置控制器的参数配置
4.)测量闭合位置控制回路
打开伺服回路优化
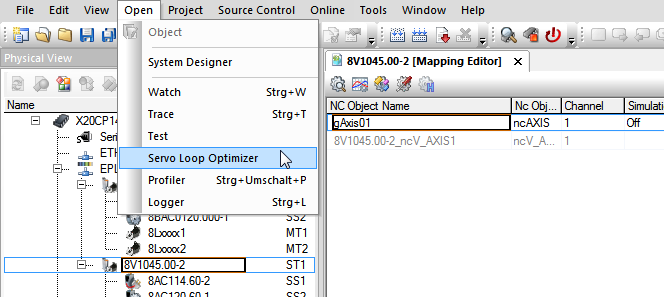
伺服回路优化器可以从映射表、 物理视图 或 逻辑视图 中的快捷菜单或主菜单打开 。
在线调整只适用于真实轴,不适用于仿真轴。
映射编辑器
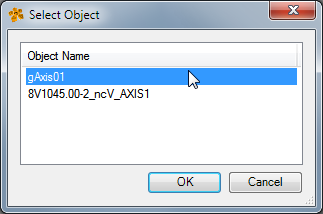
- 选择所需的轴。
- 从快捷菜单或主菜单中打开伺服回路优化。
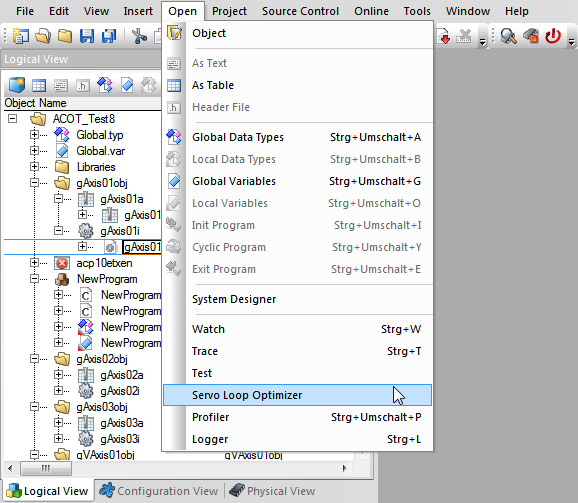
逻辑视图:
- 选择所需轴的初始参数表。
- 从快捷菜单或主菜单中打开伺服回路优化。
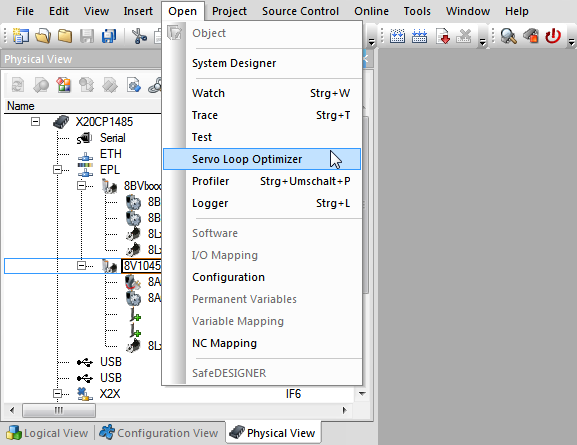
物理视图:
- 选择具有所需轴的ACOPOS设备。
- 从快捷菜单或主菜单中打开伺服回路优化
- 选择所需的轴。
模式选择
当伺服回路优化启动时,它将询问应以两种模式中的哪一种启动。
这两种模式实质上定义了伺服回路优化打开后应用程序如何控制轴。
按钮 |
功能 |
平行模式 |
处理和发送来自伺服回路优化的命令到轴上,与来自程序的命令并行(如PLCopen调用)。 优势:机器或系统继续运行而不被打断。 劣势:来自应用程序和NC测试操作员的命令可能发生冲突(例如,应用程序启动轴,而伺服回路优化触发了停止。) |
独占模式 |
阻止程序中的命令被发送到轴上。这使伺服回路优化对轴有专属控制。 优势:除了循环通信(仍处于激活状态),该模式在手动调试期间防止来自程序的访问。 缺点:伺服环路优化器的操作者对轴的运动完全负责。 |
取消 |
在离线模式下启动伺服回路优化 |
本节的主题: