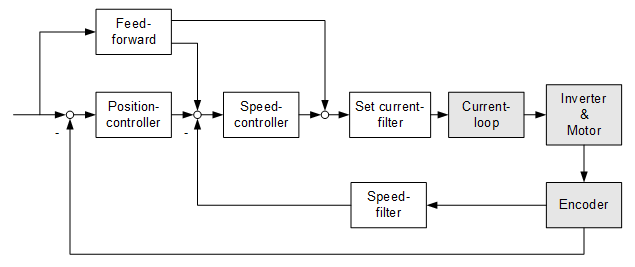
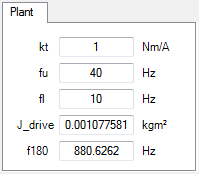
这个窗口列出了从控制对象测量的频率响应中确定的参数:
参数
输入参数 |
描述 |
kt |
|
fu |
估算总惯性矩的上限 [Hz] |
fl |
估算总惯性矩的下限 [Hz] |
结果参数 |
描述 |
J_drive |
总惯性矩 [kgm^2] |
f180 |
控制对象的相位交叉频率 [Hz] |
以下模型为估计总惯性矩提供了基础(1-质量的近似值):
K |
|
|G(f)| = |
--------------------- |
2*pi*f*J_drive |
kt |
|
其中 K = |
----------------- |
sqrt(2)*2*pi |
J_drive的确定方式是,在频率范围fl < f < fu内,近似1-mass的值 尽可能地与受控系统(控制对象)的值相一致。
在在线整定期间,从驱动器中读取扭矩常数kt。
在离线模式下,kt被设置为1.0。