这里选择的设置将始终决定比例增益,从而导致一个稳定特性输出。
在这个标签下,可以修改速度控制器的参数并应用ISQ滤波器。
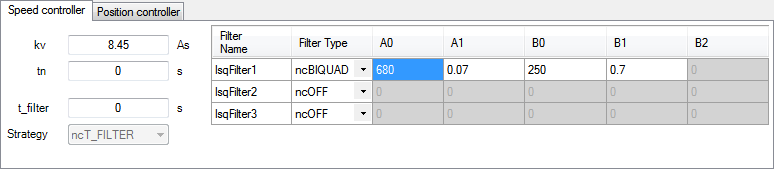
控制参数
参数 |
描述 |
kv |
|
kv |
比例增益 |
tn |
|
t_filter |
|
Strategy |
整定算法使用滤波(ncT_FILTER)或未滤波(ncT_FILTER_2)的实际速度作为控制变量(见参考手册)。对于LinMot轴或没有编码器(ELC)的轴,建议使用+ncT_FILTER_2模式。 |
滤波器参数
使用滤波器的准则
使用滤波器可以在某些情况下达到更高的比例增益。
根据机械部件的不同,有以下滤波器类型可供选择。
带阻滤波器
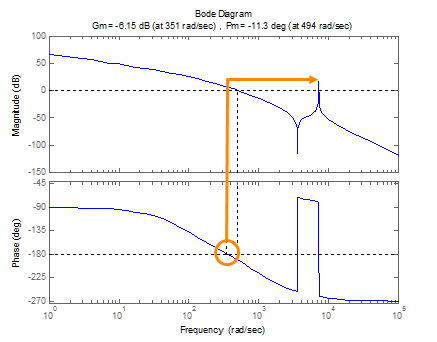
抑制尖锐的谐振,这些谐振大大高于相位交叉频率(f180),并且在操作过程中没有太大变化。
选择带宽与中带频率相同的参数是一个好主意。
低通
削弱谐振频率,也会有变化。
使用低通滤波器通常更有鲁棒性,但它们在有较强的谐振频率情况下也只能提供较弱的衰减。
双二阶:
这个滤波器允许在更大的频域内进行强衰减。
例如,这对相距很近的多个谐振是很有用的。
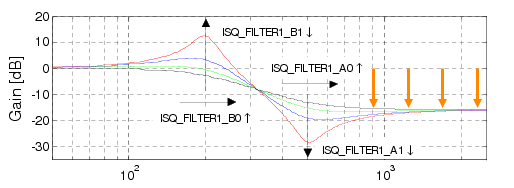
一个合理的参数处理方法应该是这样的:
•ISQ_FILTER1_A0 = 共振频率
•ISQ_FILTER1_A1 = 选择的目的是为了消除 "开环 "图中的谐振现象
•ISQ_FILTER1_B0 = 反谐振频率
•ISQ_FILTER1_B1 = 不小于0.5
z-传递函数
这个滤波器使得实现一个可自由配置的二阶离散时间传递函数成为可能。
例如,参考下面的软件包来计算系数:
•MATLAB: c2d(.)
•Scilab: dscr(.)