控制概念
ACOPOS伺服驱动器是基于一个级联控制器的概念:
1.定位命令使设定值发生器计算出路径轮廓,并在此基础上向位置控制器提供一个设定位置。
2.为了实现这个设定位置,位置控制器指定了一个速度曲线。
3.速度控制器的任务是尽可能地保持目标速度。
4.也为电流控制器定义了一个设定的电流。电流控制器控制IGBT中功率输出。
建议的步骤
1.准备
2.整定速度控制器
3.整定位置控制器
4.整定前馈
6.保存设置
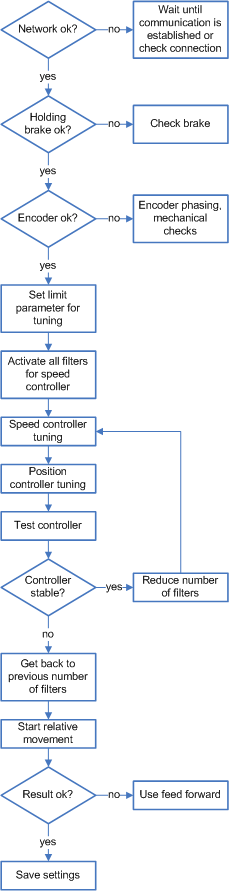
下图以流程图的形式展示了级联伺服驱动器推荐的自动整定流程。图中的热点可以直接进入相应的步骤
测试电机抱闸
编码器调相位
整定速度控制器
整定位置控制器
整定前馈
测试控制器整定结果
保存设置
本节的主题: