前馈部分的目的是在速度变化时减少控制器的负载。前馈组件使用的数值考虑到了系统的转动惯量,并在自动整定过程中确定相关前馈参数。
步骤
伺服驱动器的速度环和位置环必须稳定地运行,这是前提 。在自整定过程中,伺服轴会处于运动中,所以必须先回零。
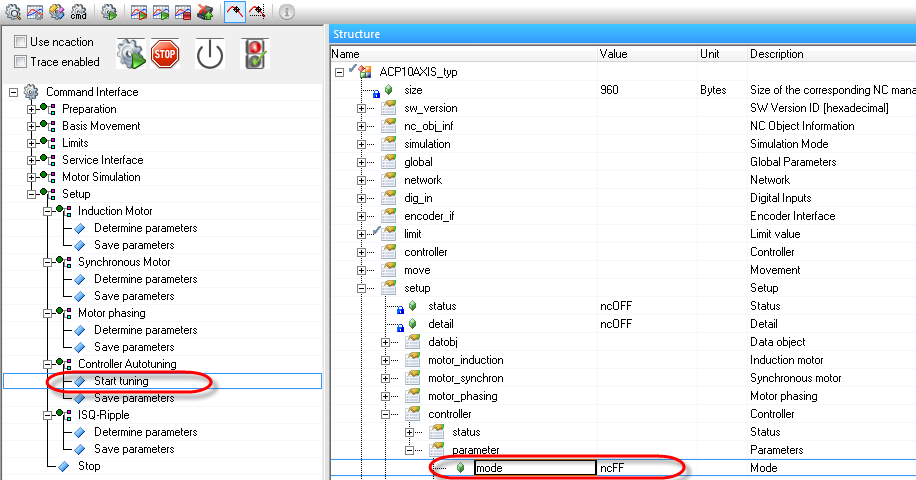
第一步 开始整定
在NC测试的命令界面,在 "Setup -> Controller Autotuning " 部分, 选择"Start tuning" :
详情请见 参考手册 部分。
采取以下步骤来确定前馈控制参数。
•估计总的转动惯量
•计算速度的基础运动参数
•计算加速度的基础运动参数
•执行相对运动以确定最大可能的加速度(由i_max_percent限制)。
•以计算出的速度曲线执行相对运动
第二 检查参数
计算出的参数显示在NC测试参数窗口:
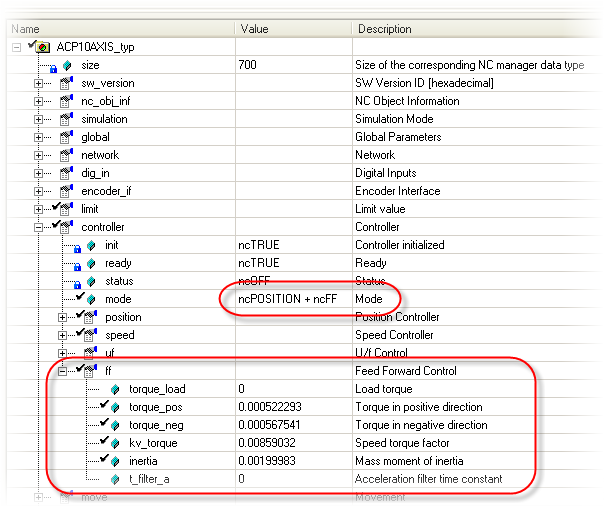
整定前馈部分会自动将控制器模式改为 "ncPosition + ncFF"。
在 "保存设置"一节中描述了计算参数的进一步使用。