位置控制器的目的是将设定值发生器提供的位置与实际位置进行比较,并为下属的速度控制器生成一个可防止偏差的操纵变量。
要求底层的电流控制器稳定地运行 。
整定时使用的操作元素
在NC测试的命令界面,在 "Setup -> Controller Autotuning " 部分, 选择"Start tuning" ,并选择"ncPOSITION"模式:
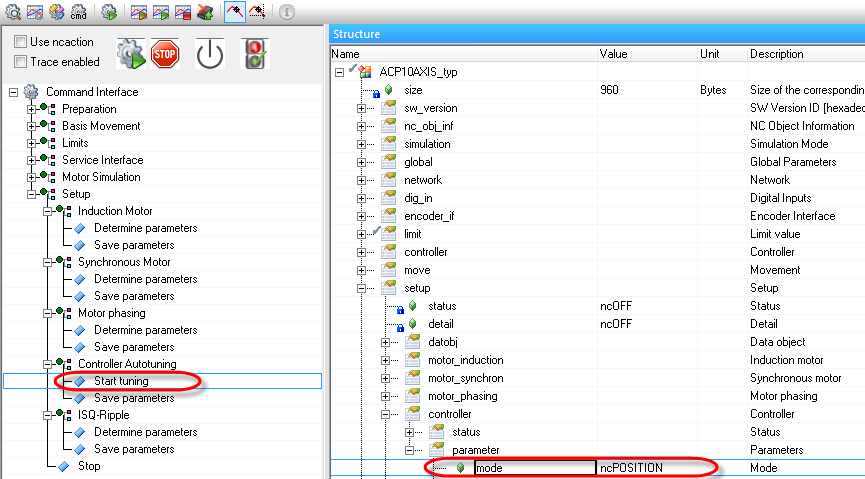
第一步 开始整定
当整定开始时,你可以听到三次电机上发出的噪音信号。
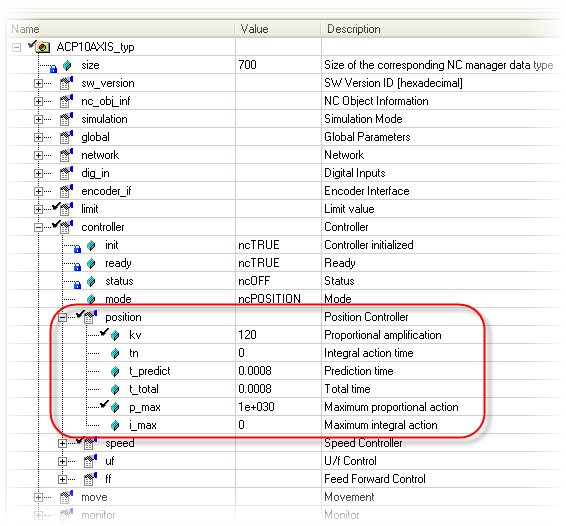
第二步 检查参数
计算出的参数显示在NC测试参数窗口:
在 "保存设置"一节中描述了计算参数的进一步使用。
下面的NC跟踪配置提供关于位置控制器的详细分析数据: position.mtc