速度控制器的工作是确定位置控制器的操纵变量(它从属于该控制器)与测量速度之间的差异。然后,它为下属的电流控制器计算相应的操纵变量,以防止出现偏差。
本流程指的是 NC测试中的手动操作 ,主要在首次调试时使用。自动整定也可以从应用程序中激活。
详情请见 参考手册 部分。
整定时使用的操作元素
在NC测试的命令界面,在 "Setup -> Controller Autotuning " 部分, 选择"Start tuning" :
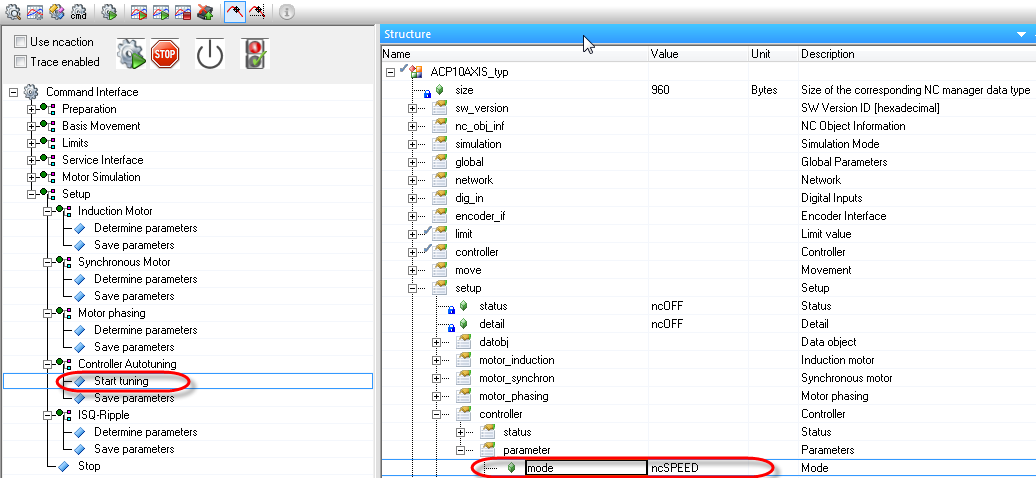
第一步 开始整定
当整定速度控制器时,有各种额外的滤波器可以自动计算。这些有助于稳定系统,但它们也使系统的动态性降低。因此,建议一开始就启用所有的滤波器。如果测试没有产生任何谐振频率,可以逐渐减少滤波器。
滤波器的详情请见 参考手册 部分。
内部采取以下步骤来确定控制参数:
•使用伪噪声二元序列(PNBS)激励机械
•计算频率响应
•在保持稳定的标准的同时,最大化比例增益
当整定开始时,你可以听到三次电机上发出的噪音信号。
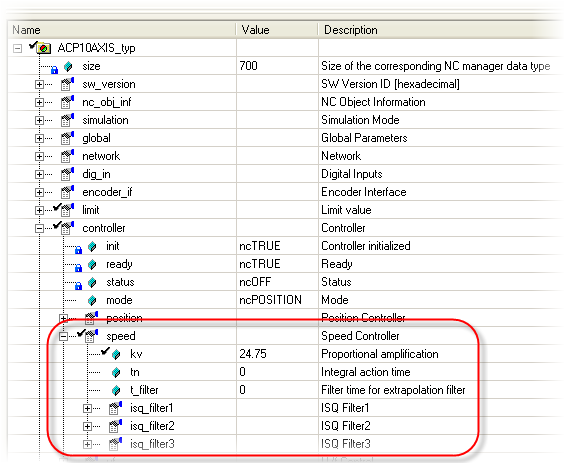
第二步 检查参数
计算出的参数显示在NC测试参数窗口:
在 "保存设置"一节中描述了计算参数的进一步使用。
下面的NC跟踪配置提供关于速度控制器的详细分析数据: speed.mtc