在使用新的控制器参数执行运动之前,应检查控制回路的稳定性。为此,系统可以选择对控制回路施加一个短的干扰信号。如果控制器参数是正确的,干扰就会衰减。
该系统测试自动确保控制器只被短暂开启,因此,如果它变得不稳定,也不会造成损害。此外,计算值与类似系统的参数进行比较,以检查其合理性。
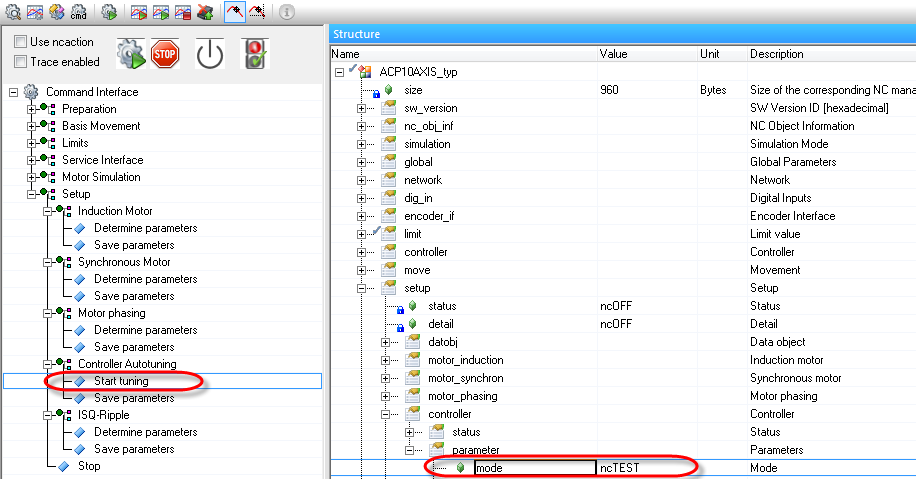
1. 开始控制器测试
在NC测试的命令界面,在 "Setup -> Controller Autotuning " 部分, 选择"Start tuning":
在acp10man库的V2.14版本之前,控制器测试适当地配置了跟踪并自动启动它。用户不需要手动做任何事情。
从acp10man库的V2.14开始,跟踪可以自由配置,因此将不再自动记录在ACOPOS上。当控制器测试完成后,只有在控制器测试前明确启动的情况下,跟踪才能被目标系统加载。详见 "ncTest"模式(控制器测试)。
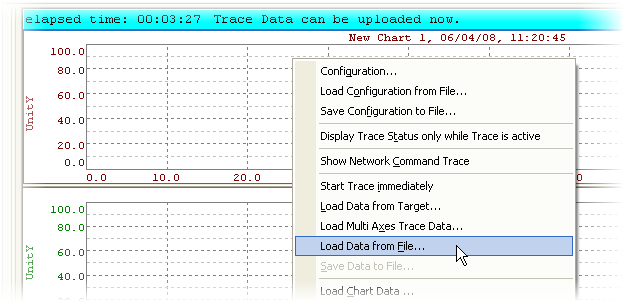
2. 上传追踪数据
当测试结束后(控制器关闭),可以从驱动器上传跟踪数据:
3. 解释
令人满意的控制器参数
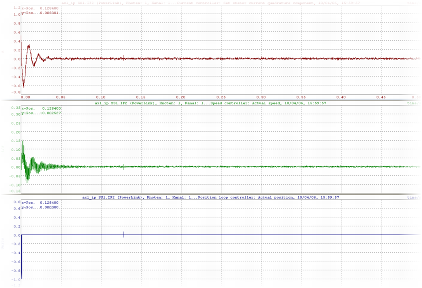
在这种情况下,可以进一步减少激活的速度控制器滤波器,并再次进行自动整定。减少滤波器使系统更有动态特性,改善控制性能。
不令人满意的控制器参数
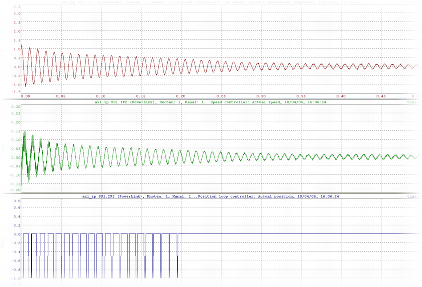
所显示的图像只是一个指导原则。关键因素是电流或速度应表现出衰变。
4. 开始运动
在控制器经过稳定性测试后,可以启动轴的运动并测量滞后误差。如果结果不理想,也可以启用 前馈 功能。