步骤:识别频率响应
成功识别后,受控系统的频率响应显示在波德图中:
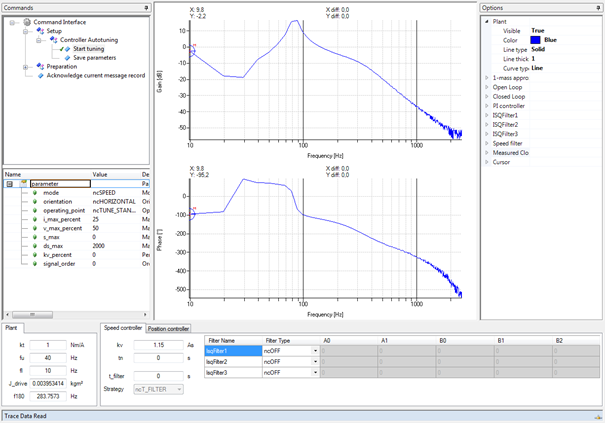
图: 频率响应的识别
由于相关的10-100Hz范围内的频率离散性较差,识别时需要对激励信号的阶数("signal_order")进行较大的数值。
信息:
"signal_order" = 0 相当于 "signal_order" = 9.
步骤:用修改过的激励方式提取特性特征
在成功识别 "signal_order"=11后,受控系统的频率响应显示在波德图中:
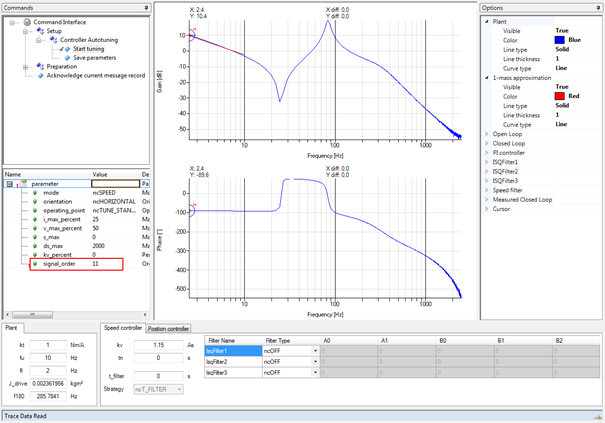
图: 有修改过激励方式的频率响应的识别
这改善了频率离散化,频域被扩展到更低的数值。
对有修改过激励方式的频率响应的识别:
•粘性摩擦很低,由于10-40Hz范围内的-20 dB/decade的直线
•共振频率 (fres) 为80 Hz
•反共振频率 (fares) 为17 Hz
•相位交越频率 (f180) 为285 Hz
•质量惯性矩的估计值为0.00236 kgm²
步骤:对标准配置的评估
SLO计算出一个增益,导致以下特点:
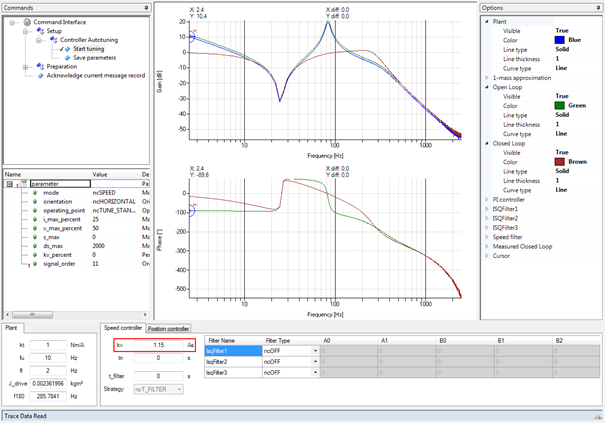
图:对标准配置的评估
闭合环路的波德图显示,图中闭合环路的设计规范所要求的特性并没有得到满足。 在高频时振幅响应有以足够的陡度下降,但是在低频段振幅响应不在0dB。
由于这个原因,我们将尝试用滤波器来改善这些特性。
步骤:使用不同的滤波器进行整定
用低通滤波器整定
无需配置低通滤波器就可以实现改进。
用notch滤波器整定
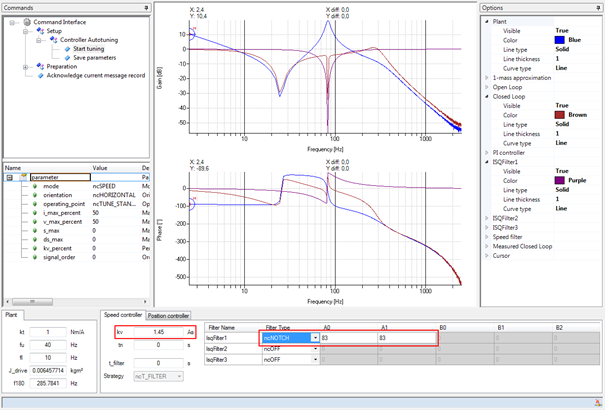
图:用notch滤波器整定
使用notch滤波器和较大的增益不能实现闭环的振幅响应在较低的频率下变得更接近于0dB。
用双二阶滤波器整定
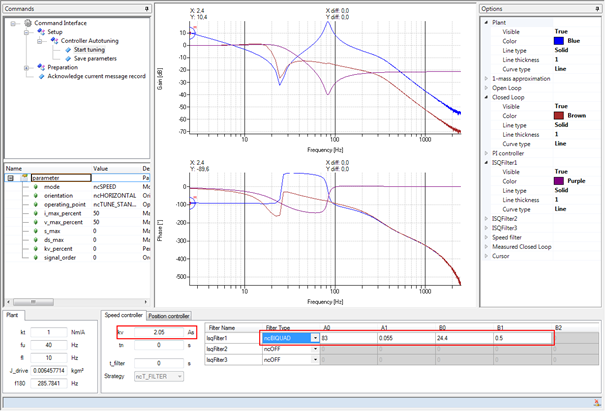
图:用双二阶滤波器整定
闭合环路的波德图显示,完全达到了图中闭合环路的设计规范所要求的特性。
结论
对这个多质量的系统使用双二阶滤波器可以在电机侧实现对设定值变化的可用响应。由于振荡趋势,负载侧的特性要差得多(在波德图中无法识别)。由于这个原因,我们建议在共振频率和反共振频率大大低于相位交越频率的受控系统中使用带有状态控制器(DYNSYS)的观察器。