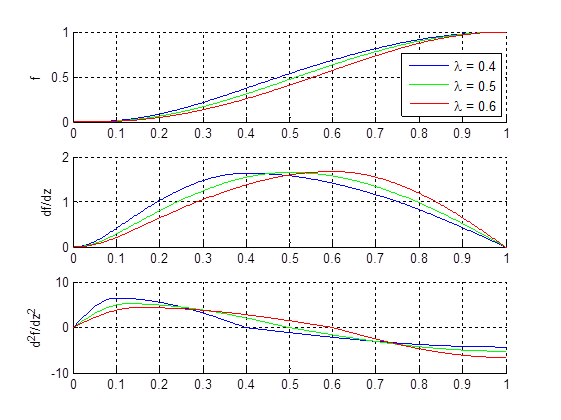
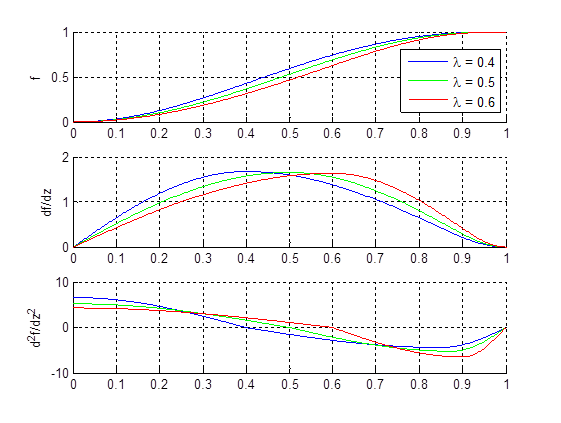
R-U(静止——反向):
U-R(反向——静止):
信息: 与标准相背离的是,λ并不是基于静止侧。 |
G-U(恒速——反向):
条件 |
其他信息 |
多项式 |
|
λ and f’(0) |
0 < λ < 1 f’(0) < π / (2 + λ·(π-2)) |
f''(1)不保持,但必须是 ≠ 0,以确定运动任务。 |
6 |
or |
|||
f’’(1) and f’(0) |
f’’(1) < -2.4674 f’(0) < π / (2 + λ·(π-2)) |
λ 可以从f''(1)和f''(0)计算出来(见VDI 2143) |
6 |
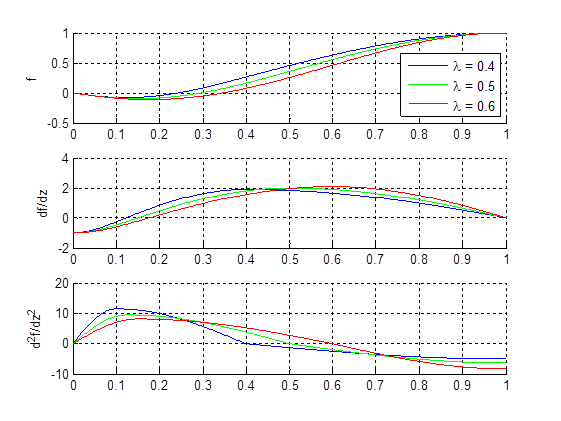
U-G(反向——恒速):
条件 |
其他信息 |
多项式 |
|
λ and f’(1) |
0 < λ < 1 f’(0) < π / (2 + λ·(π-2)) |
f''(0)不保持,但必须是 ≠ 0,以确定运动任务。 |
6 |
or |
|||
f’’(0) and f’(1) |
f’’(1) > 2.4674 f’(0) < π / (2 + λ·(π-2)) |
λ 可以从f''(0)和f''(1)计算出来(见VDI 2143) |
6 |
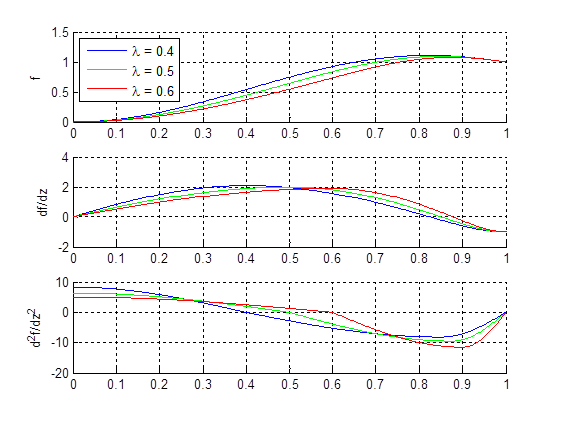
信息: 与标准不同的是, λ 不是基于恒定速度的一侧。 |