该功能块根据VDI 2143,从指定的运动规则计算近似的五阶多项式。
使用要求
•用于SG3/SGC目标系统的功能块名称 MC_044BR_CalcCamFromSections
•该功能块执行大量的计算,在某些目标系统的快速任务类中,可能会导致周期时间被超过!
允许启用该功能块的PLCopen轴状态
•所有PLCopen轴状态,对PLCopen轴状态没有影响
功能块
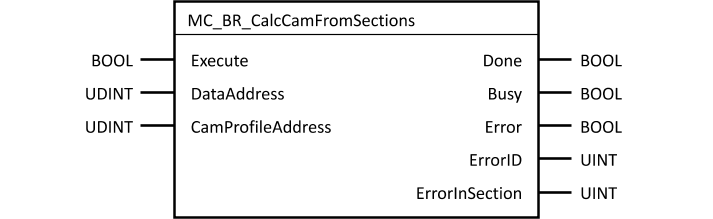
参数
输入/输出 |
参数 |
数据类型 |
说明 |
IN |
BOOL |
功能块的执行在该输入的上升沿开始。 |
|
IN |
DataAddress |
UDINT |
带有输入数据的变量的地址 MC_CAM_SECTIONS_TYP数据类型 |
IN |
CamProfileAddress |
UDINT |
用于计算凸轮轮廓数据的变量的地址 MC_CAMPROFILE_TYP数据类型 |
OUT |
Done |
BOOL |
执行成功。功能块已经完成。 |
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须继续调用。 |
OUT |
Error |
BOOL |
执行过程中出错 |
OUT |
ErrorID |
UINT |
|
OUT |
ErrorInSection |
UINT |
有错误的片段部分的索引 |
表: 参数 MC_BR_CalcCamFromSections
MC_CAM_SECTIONS_TYP 数据类型
参数 |
数据类型 |
描述 |
Section节段 |
MC_CAM_SECTIONS_TYP[129] (prior to V5.030) MC_CAM_SECTION_TYP[65] |
一个点point的数据和随后的Section节段 |
MC_CAM_SECTION_TYP 数据类型
参数 |
数据类型 |
描述 |
|
MasterPosition |
REAL |
主轴节段部分的起始位置 |
|
SlavePosition |
REAL |
从轴节段部分的起始位置 |
|
FirstDerivative |
REAL |
节段起始点的速度 |
|
SecondDerivative |
REAL |
节段起始点的加速度 |
|
Mode |
USINT |
指定主轴和从轴的绝对位置或相对于前一个点的位置 |
|
Type |
UINT |
运动规则(Motion rule): |
需要的多项式的数量: --- 1 2 4 1 4 8-10 6-8 6 |
InflectionPoint |
REAL |
拐点的主轴位置 |
|
MC_CAMPROFILE_TYP 数据类型
参数 |
数据类型 |
描述 |
MasterPeriod |
DINT |
主周期的长度 |
SlavePeriod |
DINT |
从周期的长度 |
PolynomialNumber |
UDINT |
计算的多项式的最大数量。1..128 ( V5.030之前 ) 多项式的数量:1..64 |
PolynomialData |
MC_POLYNOMIAL_DATA[128] (prior to V5.030) MC_POLYNOMIAL_DATA[64] |
多项式系数 |
MC_POLYNOMIAL_DATA 数据类型
参数 |
数据类型 |
描述 |
A |
REAL |
多项式系数 |
B |
REAL |
多项式系数 |
C |
REAL |
多项式系数 |
D |
REAL |
多项式系数 |
E |
REAL |
多项式系数 |
F |
REAL |
多项式系数 |
G |
REAL |
多项式系数 |
X |
REAL |
最大主轴位置 |
Reserved |
UDINT |
= 0 (储备) |
本节的主题: