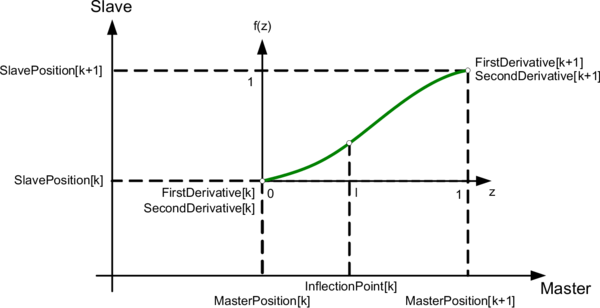
归一化运动规则和第一及第二导数:
0 ≤ z ≤ 1
f = f(z)
f' = df / dz
f'' = df' / dz
归一化边界值:
f’(0) = FirstDerivative[k] • Φ / Ψ
f’(1) = FirstDerivative[k+1] • Φ / Ψ
f’’(0) = SecondDerivative[k] • Φ • Φ / Ψ
f’’(1) = SecondDerivative[k+1] • Φ • Φ / Ψ
归一化的拐点参数:
0 < λ < 1
模式 = mcABSOLUTE: λ = (拐点[k]-主位置[k]) / Φ
模式 = mcRELATIVE: λ = 拐点[k]/Φ
信息: •如果没有指定拐点参数("InflectionPoint = 0"),那么 λ 被初始化为0.5或根据规则和任务从边界值计算出来。 |