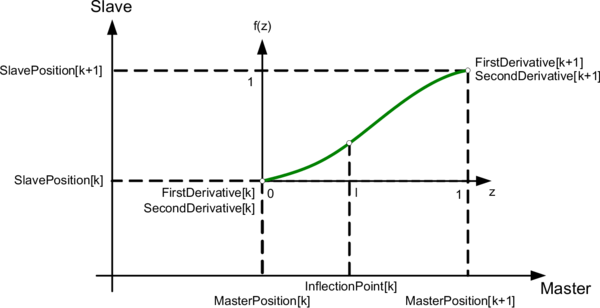
Master positions(主轴位置):
MasterPosition[k] < MasterPosition[k+1]
Slave positions(从轴位置):
SlavePosition[k] ≠ SlavePosition[k+1]
信息: 对于线性或5阶多项式曲线((mcSTRAIGHT_LINE 或 mc5TH_ORDER_POLYNOMIAL),也允许SlavePosition[k] = SlavePosition[k+1]。 |
Master and slave interval(主轴和从轴间隔):
Ф (读法:phi fai 佛爱)= MasterPosition[k+1] - MasterPosition[k]
Ψ (读法:psi psai 普西)= SlavePosition[k+1] - SlavePosition[k] (如果从轴位置相同,Ψ被设置为1!)
1st or 2nd derivatives(一阶和二阶导数):
FirstDerivative[.]
SecondDerivative[.]
信息: 必须指定点的一阶和二阶导数以确定运动任务。然而,这些值可能不会被遵守,这取决于规则和任务。 |
Inflection point parameter(拐点设置):
指定其二阶导数改变其符号的点。
Mode = mcABSOLUTE:绝对值的
MasterPosition[k] < InflectionPoint[k] < MasterPosition[k+1]
Mode = mcRELATIVE:相对值的
0 < InflectionPoint[k] < MasterPosition[k+1]