如轴 部分所述,一个轴和它的环境是用配置模块定义的。一个轴在插入驱动器时由向导自动配置。
不过,也可以手动进行设置,以改变向导所做的设置或重新定义轴。
本节中包括以下主题:
1.设置NC映射表
2.插入错误文本
3.设置NC初始化表
5.为轴添加过程变量
6.设置系统时钟
1. 设置NC映射表
NC映射表可以从快捷菜单中打开。
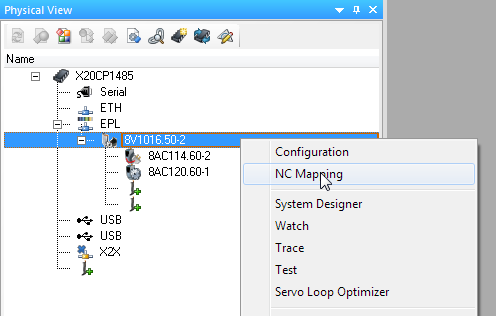
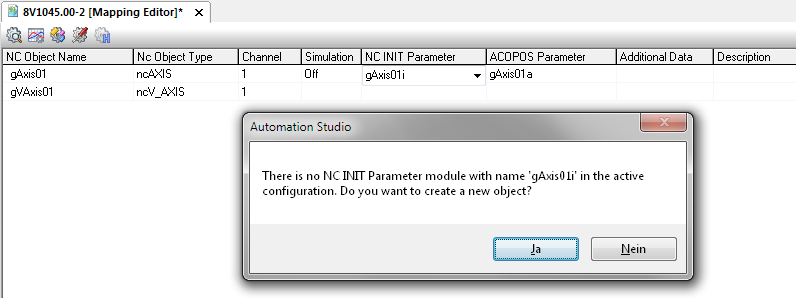
这个例子显示了NC映射表是如何填写的:
属性 |
描述 |
NC object name(NC对象名称) |
全局变量的名称,该变量以后代表该轴对象。 (例如 gAxis01) |
NC INIT parameter(NC初始化参数表) |
用于初始化轴对象变量的NC 初始化参数表的名称 (例如 gaxis01i) 如果这个模块在逻辑视图中还不存在,当上面显示的消息框确认后,它将被创建。
|
ACOPOS parameter(ACOPOS参数表) |
用来初始化驱动器的ACOPOS参数表的名称 (例如 gaxis01ia) |
这些模块的详细描述可以在 配置模块 部分找到 。
2. 插入错误文本
如果错误或警告发生时,应在控制器上生成错误号码的纯文本,则必须将相应的文本组下载到控制器。
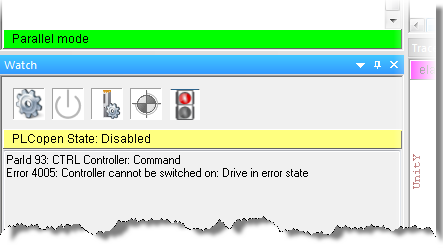
控制器上只 需要有一个该模块的实例(伺服错误文本文件) 。多个轴可以共享同一个模块作为错误文本的来源。
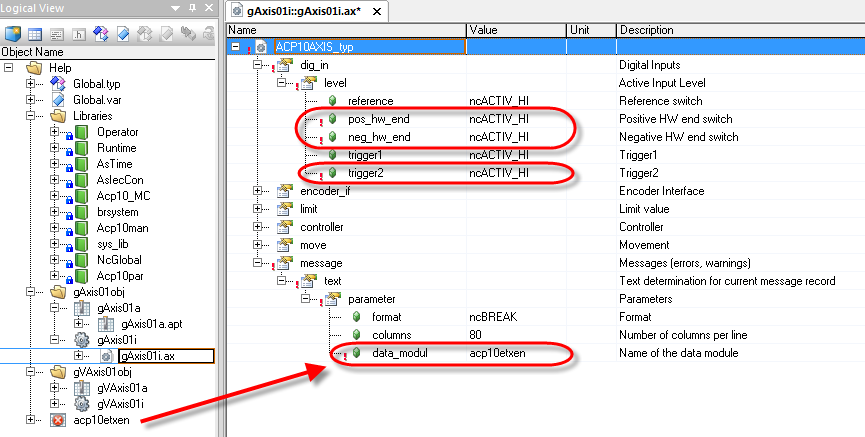
3. 设置NC初始化表
通常应核实以下设置,并在需要时进行调整:
在进行以下设置后,dig_in在常开情况下不再被监测,并且在施加24V电压之前不会被触发(即高电平有效)。
4. 设置ACOPOS参数表
当驱动器被初始化时如果需要有参数下载到驱动器里面,则可以提前将参数配置写到ACOPOS参数表中。
这使得它有可能做一些事情,比如在电机不存在的情况下让ACOPOS驱动器模拟仿真电机。

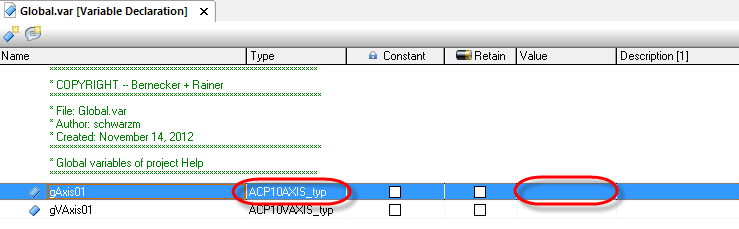
5. 为轴添加过程变量
为了使一个变量被NC系统识别为轴对象变量,它必须满足以下要求:
•该名称必须与NC映射表中的 "NC对象名称 "列中输入的名称相同。
•类型为ACP10AXIS_typ(用于实轴)或ACP10VAXIS_typ(用于虚轴)。
•全局变量
•不能指定初始化值 --甚至不能是 "0"!
•该变量必须在程序中使用,以使其分配在控制器上。
6. 设置系统时钟
建议将控制器同步到POWERLINK网络。要做到这一点,必须对系统时钟进行相应的设置。
CPU的配置可以从物理视图的快捷菜单中打开。

属性 |
描述 |
System timer(系统时钟) |
选择控制器应与之同步的接口 |
Task class idle time(任务空闲时间) |
必须始终是系统时钟的整数倍,可能需要调整(如2000微秒)。 |