这些输入定义了凸轮表(cam table)中主轴和从轴的拉伸系数。虽然数据类型是REAL,但这里不考虑小数位。 在这些输入中不考虑PLCopen轴单位系数 (即凸轮的单位与轴单位相同,而不是PLCopen单位)。
下面的例子说明了如何使用两个不同的凸轮定义来实现相同的运动轮廓曲线。
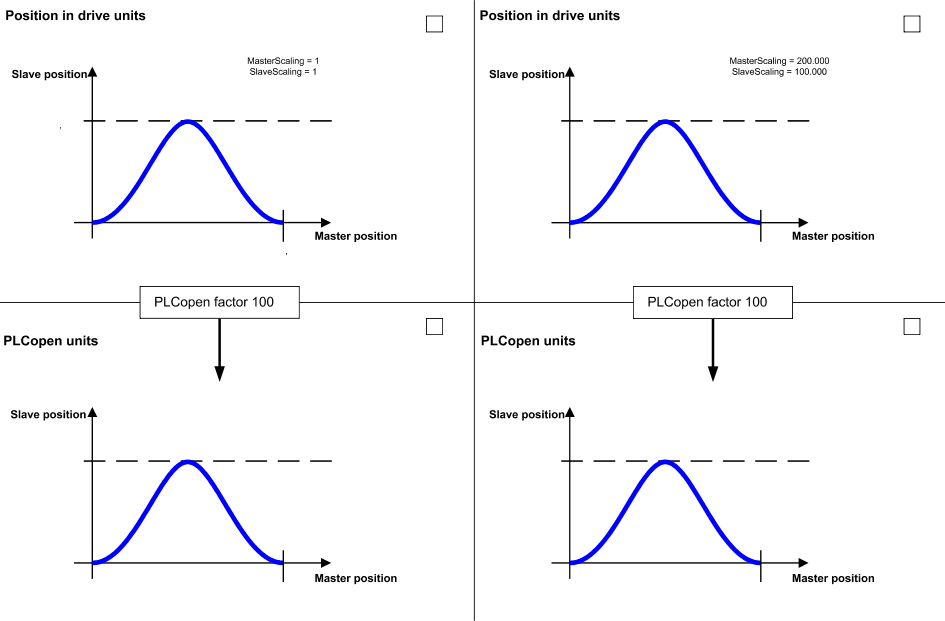
在凸轮A中,200,000被指定为最大主轴位置。从轴应执行100,000 units单位的运动,并在主轴最大位置返回到0units单位。"MasterScaling "和 "SlaveScaling "的值为1。如果 PLCopen轴单位系数 为100,则从轴的运动将达到1000个PLCopen单位的最大位置。从轴在主轴位置为2000个PLCopen单位的位置上返回到其零位。
用不同的凸轮延展定义和不同的 "MasterScaling "和 "SlaveScaling "值可以实现相同的运动曲线。如果凸轮cam曲线定义的主、从轴侧延展为1(即曲线中主从轴的最大值为1),如例子B,通过调整拉伸系数(multiplication factors),可以很容易地改变运动曲线。将 "MasterScaling "初始化为200,000,"SlaveScaling "初始化为100,000,产生的结果与前面的例子相同。
图B和D是相同的。