<< 点击显示目录 >>
主页 轴控开发使用手册 > ACP10/ARNC0帮助信息 > ACP10_MC运动库 > 分类的功能块 > 凸轮(Cams) > 计算和保存 > MC_BR_GetCamSlavePosition >
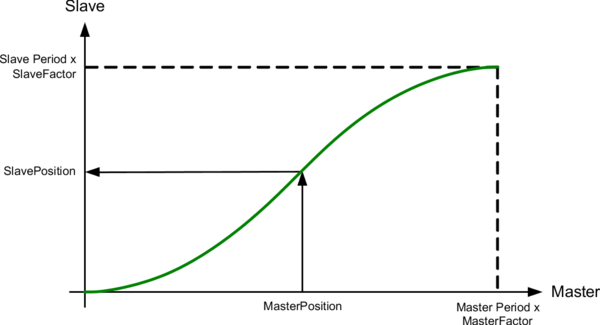
该功能块根据给定的凸轮、主/从拉伸系数和给定的主轴位置 来确定从轴位置。
凸轮可以通过数据对象名称或凸轮数据的地址来指定。可以让主站和从站轴对象引用输入保持开放。在这种情况下,功能块不能考虑这些轴的PLCopen系数,而是使用1的系数。