The movement is started each time the configured event occurs. If this happens while a movement is already in progress, the event will be rejected.
Example without using "DistanceParID" ("Execute" only set for one cycle):
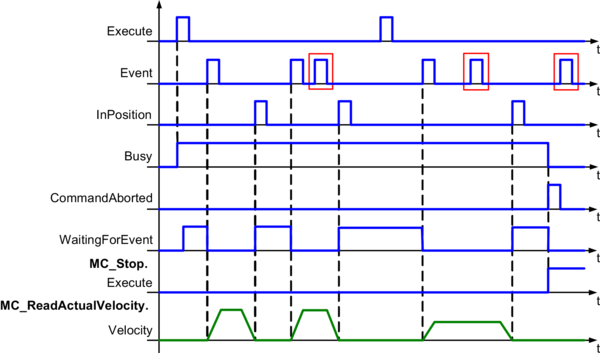
A new movement distance, movement parameters, etc. are specified on the first rising edge of the "Execute" input. The "WaitingForEvent" output is set to TRUE as soon as everything is configured and the drive accepts an event.
The first two events on the drive each start a movement using the specified distance.
The next rising edge of the "Execute" input specifies a new movement distance and new movement parameters, which will then be used after the next event.
The three events marked in red above are ignored. The first two are not used because all events are discarded while a movement is active in this mode. The third is ignored because the function block was aborted by calling an MC_Stop function block.
Example without using "DistanceParID" ("Execute" remains set):
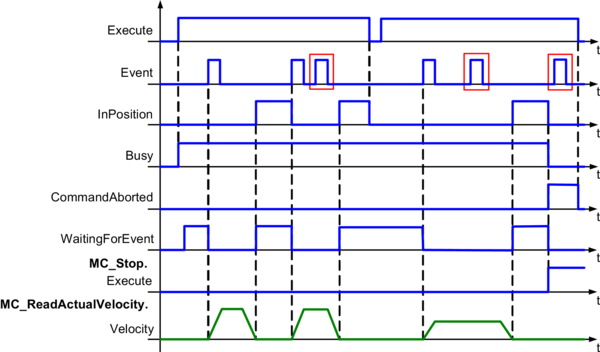
The only difference from the previous example is that the "Execute" input remains set for longer than one task cycle here. This affects the "InPosition" and "CommandAborted" outputs.
Example using "DistanceParID" ("Execute" only set for one cycle):
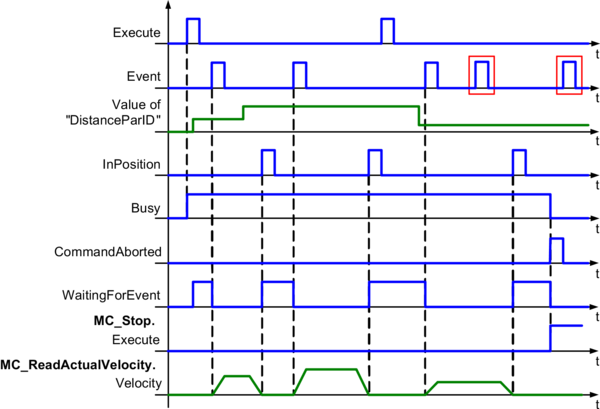
The movement parameters, etc. are specified on the first rising edge of the "Execute" input. The "WaitingForEvent" output is set to TRUE as soon as everything is configured and the drive accepts an event.
The subsequent events on the drive start a movement with the distance that corresponds to the value of the ACOPOS ParID specified on the "DistanceParID" function block input.
The next rising edge of the "Execute" input specifies new movement parameters, which will then be used after the next event.
The 2 events marked in red above are ignored. The first of the two is not used because events are rejected while a movement is active in this mode. The second is ignored because function block execution was aborted by calling an MC_Stop function block.