<< 点击显示目录 >>
主页 轴控开发使用手册 > ACP10/ARNC0帮助信息 > ACP10_MC运动库 > 分类的功能块 > 主轴相移(phase)和从轴偏移(offset) > MC_Phasing >
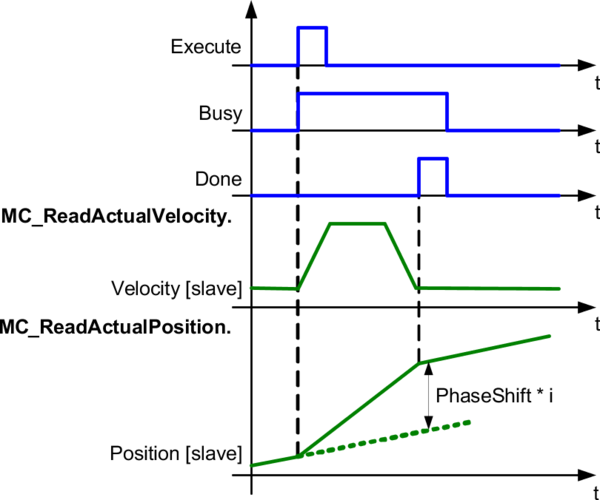
下面的例子显示了正在进行的跟随齿轮比为 "i "的相位偏移动作流程。"执行"输入的一个上升沿开始了这个流程。
移位的位置(PhaseShift*i)和速度被叠加到原来的从轴位置和速度上。从轴因此而加速。移相完成后,"Done "输出被设置,从轴以其原始速度恢复运动。