该功能块在从轴耦合的主轴位置上创建一个相位偏移。主轴的位置相对于其实际的物理位置有所偏移。相位偏移只被从轴 "看到",主轴不会注意到。
相位偏移量保持不变,直到它被另一个相移命令所改变。
这个功能块可以在与功能块 MC_GearIn、 MC_GearInPos、 MC_CamIn、 MC_BR_CamDwell 或 MC_BR_AutoCamDwell启动耦合时使用 。
如果用功能块 MC_BR_AutControl启用了耦合,则不能使用该功能块 。
相位偏移Phase shifts是使用绝对值执行的。调用MC_Phasing两次,其值为 "PhaseShift = 10",将导致10个单位的相移,而不是20个。
例子1:使用 MC_GearIn将一个从轴与一个主轴耦合起来 。实施了15个单位的相移。如果在轴停止并重新耦合后开始新的10个单位的相移,则有效地发生了-5个单位的相移,因为以前的相移值并没有因为轴的停止而被重置。
例子2:一个从轴使用 MC_GearIn与一个主轴耦合。实施了15个单位的移相。在中止耦合或从轴停止之前,以0单位开始移相。在轴停止后,通过 再次调用 MC_GearIn重新耦合 。如果现在重新实施了10个单位的移相,那么就会发生10个单位的有效移相。
在可能的情况下,遵循例2的流程。
如果在轴脱离耦合之前不能重置相位,那么 "PhaseShift "的新值可以加到以前MC_Phasing调用的指定值中。
信息: V2.160 及以上版本 如果在一个活动中的移相期间,耦合被基础移动所中止,该功能块仍将报告 "完成"。 |
使用要求
允许启用功能块的PLCopen轴状态
•同步运动
功能块
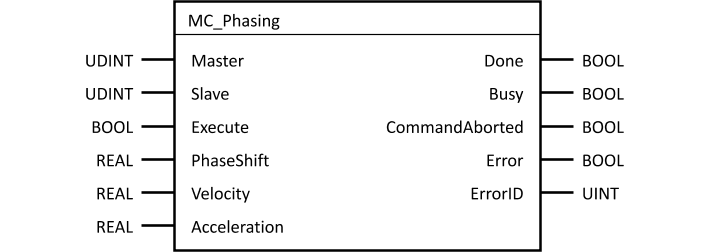
参数
输入/输出 |
参数 |
数据类型 |
说明 |
|
B |
IN |
Master |
UDINT |
主轴 轴对象引用 |
B |
IN |
Slave |
UDINT |
从轴 轴对象引用 |
B |
IN |
BOOL |
功能块的执行在该输入的上升沿开始。 |
|
B |
IN |
PhaseShift |
REAL |
相位偏移量[主轴单位] |
E |
IN |
Velocity |
REAL |
达到相位移动的最大速度[主轴单位/秒] |
E |
IN |
Acceleration |
REAL |
达到相位移动的最大加速度[主轴单位/s²] |
B |
OUT |
Done |
BOOL |
达到目标相位偏移 |
E |
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须继续调用。 |
E |
OUT |
CommandAborted |
BOOL |
功能块被另一个功能块中止了 |
B |
OUT |
Error |
BOOL |
执行过程中出错 |
E |
OUT |
ErrorID |
UINT |
表: 参数 MC_Phasing
本节的主题: