该功能块检查Cam Profile Automat 功能的启动、停止、重新启动、信号和锁定参数。
使用要求
•SG3/SGC目标系统的功能块名称 MC_020BR_AutControl
•当功能块激活时,不允许对指定的轴进行回零动作。
允许启用该功能块的PLCopen轴状态
参数 |
允许启用功能块的PLCopen轴状态 |
||||||
"Enable = 1" |
Yes |
||||||
"ParLock = 1" |
Yes |
如果 同步运动 是由 MC_BR_AutControl 引起的 |
Yes |
||||
"Signal1 = 1" |
Yes |
||||||
"Signal2 = 1" |
|||||||
"Signal3 = 1" |
|||||||
"Signal4 = 1" |
|||||||
"InitAutData = 1" |
Yes |
||||||
"Start = 1" |
Yes |
No |
|||||
"Stop = 1" |
No |
||||||
"Restart = 1" |
No |
||||||
功能块
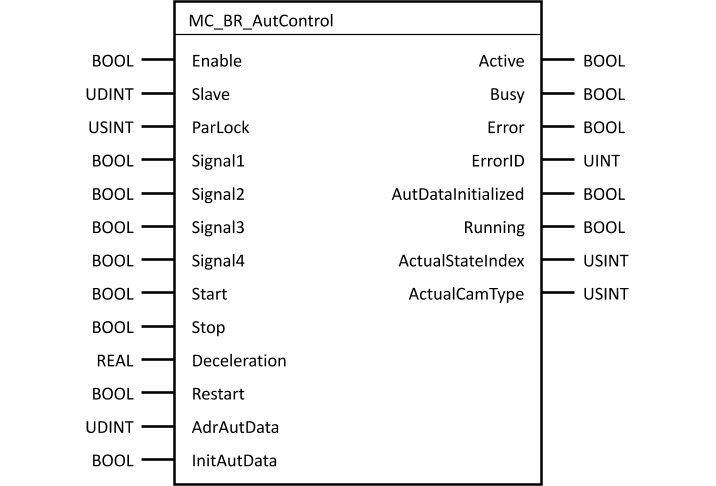
参数
输入/输出 |
参数 |
数据类型 |
说明 |
IN |
BOOL |
只要这个输入被设置,该功能块就处于活动状态。 |
|
IN |
Slave |
UDINT |
从轴轴对象引用 |
IN |
ParLock |
USINT |
锁定用于保证在线参数更改的一致性 |
IN |
Signal1 |
BOOL |
1...设置信号1,0...复位信号1 |
IN |
Signal2 |
BOOL |
1...设置信号2,0...复位信号2 |
IN |
Signal3 |
BOOL |
1...设置信号3,0...复位信号3 |
IN |
Signal4 |
BOOL |
1...设置信号4,0...复位信号4 |
IN |
Startup |
BOOL |
启动命令 |
IN |
Stop |
BOOL |
停止命令 |
IN |
Deceleration |
REAL |
最大减速度[从轴PLCopen单位/s²] |
IN |
Restart |
BOOL |
重新启动命令 |
IN |
AdrAutData |
UDINT |
可选的凸轮automat 数据结构的地址(类型为 MC_AUTDATA_TYP的变量) |
IN |
InitAutData |
BOOL |
初始化可选的Cam Profile Automat 数据结构上的参数 |
OUT |
Active |
BOOL |
功能块激活,可以执行运动 |
OUT |
Busy |
BOOL |
功能块处于激活状态,必须继续被调用。 |
OUT |
Error |
BOOL |
执行过程中出现错误 |
OUT |
ErrorID |
UINT |
|
OUT |
AutDataInitialized |
BOOL |
Cam Profile Automat 的数据结构被初始化。 |
OUT |
Running |
BOOL |
Cam Profile Automat运行中 |
OUT |
ActualStateIndex |
USINT |
当前状态的索引 |
OUT |
ActualCamType |
USINT |
当前状态的凸轮类型 0 ...凸轮 1 ...补偿 |
表: 参数 MC_BR_自动控制
MC_AUTDATA_TYP data type
该数据类型包含 "全局 "凸轮自动装置参数(主轴、起始位置等)。该结构或 MC_BR_InitAutPar 功能块都可用于初始化以下参数配置。
参数 |
数据类型 |
描述 |
ACOPOS-ParID( 驱动器-参数ID) |
Master |
UDINT |
主轴的轴参考 |
根据轴的参考,将以下ParID写入: AUT_MA_AXIS |
StartPosition |
REAL |
主轴的起始位置 [主轴的PLCopen单位] |
AUT_MA_S_START |
StartInterval |
REAL |
主轴的起始区间间隔 [主轴的PLCopen单位] |
AUT_MA_IVSTART |
EventStartPositionInInterval |
REAL[5] |
主轴在生成 ncS_START_IV1、 ncS_START_IV2、 ncS_START_IV3 和 ncS_START_IV4 事件的间隔内的相对起始位置 [主轴的PLCopen单位] (V2.270 及以上版本) 注意: "EventStartPositionInInterval[0]"当前必须始终设置为 "0";否则,初始化功能块将报告错误。 注意: 位置值也必须随着索引号的上升而递增,并小于或等于 "StartInterval"间隔。1 ≤ s[i] ≤ s[i+1] ≤ "StartInterval" |
AUT_MA_S_START_IV |
StartState |
USINT |
起始状态的索引 自动启动后的状态指数0-14(默认0=基本状态) |
AUT_START_ST_INDEX |
StartMaRelPos |
REAL |
凸轮中的相对主轴位置[主轴的PLCopen单位] |
AUT_CAM_MA_S_REL |
MasterStartPosMode |
USINT |
ncS_START事件类型的模式 0: 在过渡到状态0时重新计算起始位置 1: 不重新计算 注意: +128:使用 "StartPositionDINT "而不是 "StartPosition"(对ACOPOS ParID没有影响) (V2.380 及更高)。 |
AUT_S_START_MODE |
StartPositionDINT |
DINT |
主轴的起始位置[主轴单位]。 (V2.380 及更高版本) |
AUT_MA_S_START |
MaxMasterVelocity |
REAL |
主轴的最大速度[主轴的PLCopen单位]。 用于计算补偿多项式 注意: 该值用于计算耦合、改变齿轮比或凸轮曲线以及切割区域之间的补偿运动(取决于功能)。这个参数对ACOPOS错误 37113::"凸轮补偿齿轮:超过了极限值"的发生有相当大的影响.
没有指定值: 主轴速度改变或通过 "InitData "或 "Execute "进行的参数更新会导致不同的、自动计算的运动曲线。
指定值: 指定主轴在与从轴耦合时达到的最大速度值,会导致自动计算的运动曲线总是相同。 |
AUT_MA_V_MAX |
MasterParID |
UINT |
主轴的参数ID 注意: 当使用0以外的值时(即使是位置ParID),主轴的PLCopen系数不应用于涉及主轴的任何参数。 |
AUT_MA_AXIS |
AddMasterParID |
UINT |
主轴附加的参数ID |
AUT_MA_ADD_AXIS |
AddSlaveParID |
UINT |
从轴附加的参数ID |
AUT_SL_ADD_AXIS |
SlaveFactorParID |
UINT |
从轴的曲线缩放系数的参数ID 0= 禁用,比如系数因子=1 曲线从轴周期的缩放系数的输入(所有STATE有效) |
AUT_SL_FACTOR_ID |
EventParID |
UINT |
事件输入1的参数ID(ncPARID1) 0= 禁用 |
AUT_EVENT_ID1 |
EventParID2 |
UINT |
事件输入2的参数ID(ncPARID2) 0= 禁用 |
AUT_EVENT_ID2 |
EventParID3 |
UINT |
事件输入3的参数ID (ncPARID3) 0= 禁用 |
AUT_EVENT_ID3 |
EventParID4 |
UINT |
事件输入4的参数ID (ncPARID4) 0= 禁用 |
AUT_EVENT_ID4 |
SlaveLatchParID |
UINT |
用于从轴锁存值的参数ID 0= 禁用 |
AUT_SL_LATCH_ID |
State |
MC_AUTDATA_STATE_TYP[15] |
定义了基础状态和其他14种状态 |
|
MC_AUTDATA_STATE_TYP 数据类型
最多可以用这个数据类型定义15个凸轮自动状态。该数据结构或 MC_BR_InitAutState 功能块都可以用于初始化。
参数 |
数据类型 |
描述 |
ACOPOS-ParID(驱动器参数ID) |
DisableStateInit |
USINT |
ncON ...此状态的参数不会 被MC_BR_AutControl 或 MC_BR_InitAutData 下载到驱动器 。 ncOFF ...该状态的参数由 MC_BR_AutControl 或 MC_BR_InitAutData下载到驱动器。 |
|
CamProfileIndex |
UINT |
用 MC_BR_DownloadCamProfileObj 或 MC_BR_DownloadCamProfileData 提前下载的为了后期在State中使用的凸轮数据的索引
下载数据的参考引用(而不是名称) 1...14 一个状态内要使用的曲线索引 0xFFFF 预先配置的1:1线 0xFFFE 预先配置的0曲线,出口带斜率的点 |
AUT_ST_DATA_INDEX |
MasterFactor |
DINT |
主轴的缩放系数 |
AUT_MA_FACTOR |
SlaveFactor |
DINT |
从轴的缩放系数 |
AUT_SL_FACTOR |
CompMode |
USINT |
AUT_COMP_MODE |
|
MasterCompDistance |
REAL |
主轴的补偿距离[主轴的PLCopen单位] |
AUT_COMP_MA_S |
SlaveCompDistance |
REAL |
从轴的补偿距离[从轴的PLC开放单位] |
AUT_COMP_SL_S |
RepeatCounterInit |
UINT |
ncCOUNT 事件的状态重复的起始设定值 一旦运行完这个设定值数,就会触发ncCOUNT 事件。下一次过渡到该状态时,它将以计数器状态为零重新初始化。 |
AUT_ST_COUNT_INIT |
RepeatCounterSet |
UINT |
ncCOUNT 事件的状态重复计数 用于设置到 ncCOUNT 事件前 当前计数器状态剩余重复的次数 |
AUT_ST_COUNT_SET |
MasterCamLeadIn |
REAL |
主轴进入状态state的相对进入位置[主轴的PLCopen单位]。 |
AUT_MA_CAM_LEADIN |
ExtendedCompLimits |
UINT |
附加补偿参数。 ncOFF / ncON 注意: 当设置为 ncON时 ,使用以下8个参数。 当设置为ncOFF时,不使用它们。 |
|
MinMasterCompDistance |
REAL |
主轴的最小补偿距离[主轴的PLCopen单位]。 用于限制计算的 "有效 "补偿距离 注意: 该参数仅在".ExtendedCompLimits" = ncON时使用 。 |
AUT_COMP_MA_S_MIN |
MinSlaveCompDistance |
REAL |
从轴的最小补偿距离[从轴的PLCopen单位] 用于限制计算的 "有效 "补偿距离 注意: 该参数仅在".ExtendedCompLimits" = ncON时使用 。 |
AUT_COMP_SL_S_MIN |
MaxSlaveCompDistance |
REAL |
从轴的最大补偿距离[从轴的PLCopen单位]。 用于限制计算的 "有效 "补偿距离 注意: 该参数仅在".ExtendedCompLimits"= ncON时使用 。 |
AUT_COMP_SL_S_MAX |
MinSlaveCompVelocity |
REAL |
补偿期间从轴的最小速度 [从轴的PLCopen单位/s] 注意: 该参数仅在".ExtendedCompLimits"=ncON时使用。 |
"AUT_COMP_SL_V_MIN" |
MaxSlaveCompVelocity |
REAL |
补偿期间从轴的最大速度 [从轴的PLCopen单位/s] 。 注意: 该参数仅在".ExtendedCompLimits"=ncON时使用。 |
AUT_COMP_SL_V_MAX |
MaxSlaveAccelComp1 |
REAL |
补偿阶段1中从轴的最大加速度[从轴的PLCopen单位/s²] 从开始到最大/最小速度的加/减速,用于计算补偿多项式 注意: 该参数仅在".ExtendedCompLimits" = ncON时使用 。 |
AUT_COMP_SL_A1_MAX |
MaxSlaveAccelComp2 |
REAL |
补偿阶段2中从轴的最大加速度[从轴的PLCopen单位/s²] 从最大/最小速度到终点的加/减速,用于计算补偿多项式 注意: 该参数仅在".ExtendedCompLimits" = ncON时使用 。 |
AUT_COMP_SL_A2_MAX |
SlaveCompJoltTime |
REAL |
补偿过程中从轴的加加速时间 [s) 对于补偿模式 ncV_COMP_A_SL 注意: 该参数仅在".ExtendedCompLimits" = ncON时使用 。 |
AUT_COMP_SL_T_JOLT |
MasterParID |
UINT |
一个状态的主轴的参数ID 0 = 全局轴AUT_MA_AXIS被激活(默认)。 |
AUT_MA_ID |
Event |
MC_AUTDATA_EVENT_TYP[5] |
一个状态下的事件定义 |
|
MC_AUTDATA_EVENT_TYP 数据类型
这个数据类型可以用来定义状态转换的事件。这个结构或者 MC_BR_InitAutEvent 功能块都可以用来进行初始化。
参数 |
数据类型 |
描述 |
ACOPOS-ParID(驱动器参数ID) |
Type |
USINT |
事件类型: ncOFF ncS_START ncS_START_IV1...4 ncST_END ncST_END+ncNEGATIVE ncCOUNT ncSIGNAL1...4 ncTRIGGER1+ncP_EDGE/ncN_EDGE ncTRIGGER2+ncP_EDGE/ncN_EDGE ncAND_N2E ncPAR_ID1...4 |
AUT_EVENT_TYPE |
Attribute |
USINT |
ncAT_ONCE ncST_END |
AUT_EVENT_ATTR |
Action |
UDINT |
状态转换时的动作Action |
AUT_EVENT_ACTION |
NextState |
USINT |
下一个状态的索引 0...14 在事件到达时过渡到这个状态 255 彻底终止automat自动序列 |
AUT_EVENT_ST_INDEX |
本节的主题: