该功能块初始化一般的 凸轮序列cam Automat 参数。附加的参数只能用ParID指定,不能用轴。如果这里使用轴的位置,那么必须首先用 MC_BR_InitMasterParIDTransfer 功能块启动传输 。
使用要求
•SG3/SGC目标系统的功能块名称 MC_017BR_InitAutPar
允许启用该功能块的PLCopen轴状态
所有PLCopen轴状态,对PLCopen轴状态没有影响
功能块
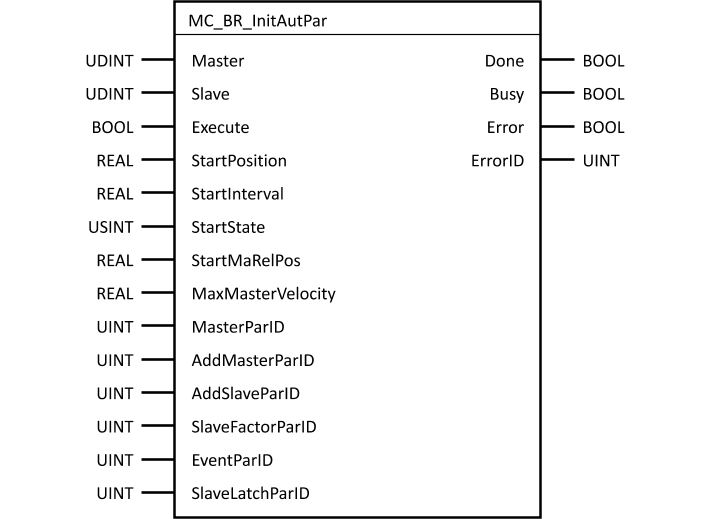
参数
输入/输出 |
参数 |
数据类型 |
描述 |
ACOPOS-ParID |
IN |
UDINT |
主轴对象引用 |
根据轴的参考,将以下ParID写入: AUT_MA_AXIS |
|
IN |
UDINT |
从轴对象引用 |
|
|
IN |
BOOL |
在上升沿开始初始化 |
|
|
IN |
StartPosition |
REAL |
主轴的起始位置 [主轴的PLCopen单位] |
AUT_MA_S_START |
IN |
StartInterval |
REAL |
主轴的起始区间间隔[主轴的PLCopen单位] |
AUT_MA_IVSTART |
IN |
StartState |
USINT |
启动状态的索引 |
AUT_START_ST_INDEX |
IN |
StartMaRelPos |
REAL |
凸轮中的相对主轴位置[主轴的PLCopen单位] |
AUT_CAM_MA_S_REL |
IN |
MaxMasterVelocity |
REAL |
主轴的最大速度 [主轴的PLCopen单位/s ] 。
注意: 该值用于计算耦合、改变齿轮比或凸轮以及切割区之间(取决于功能)的补偿运动。这个参数对ACOPOS错误 37113:"凸轮补偿齿轮:超过了极限值"的发生有相当大的影响。
没有指定数值:主轴速度改变或通过 "InitData "或 "Execute "进行的参数更新会导致不同的、自动计算的运动曲线。
指定数值: 指定主轴在与从轴耦合时达到的最大速度值,会导致自动计算的运动曲线总是相同的。 |
AUT_MA_V_MAX |
IN |
MasterParID |
UINT |
这个ParID被用来代替位置设定点;0...使用位置设定点
注意: 当使用0以外的值时(即使是位置ParID),主轴的PLCopen系数不应用于涉及主轴的任何参数。 |
AUT_MA_AXIS |
IN |
AddMasterParID |
UINT |
主轴附加的参数ID |
AUT_MA_ADD_AXIS |
IN |
AddSlaveParID |
UINT |
从轴附加的参数ID |
AUT_SL_ADD_AXIS |
IN |
SlaveFactorParID |
UINT |
从轴的曲线缩放系数的参数ID |
AUT_SL_FACTOR_ID |
IN |
EventParID |
UINT |
事件输入的参数ID |
AUT_EVENT_ID1 |
IN |
SlaveLatchParID |
UINT |
从属轴的锁存值的参数ID |
AUT_SL_LATCH_ID |
OUT |
Done |
BOOL |
初始化完成 |
|
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须继续被调用。 初始化正在进行 |
|
OUT |
Error |
BOOL |
执行过程中出错 |
|
OUT |
ErrorID |
UINT |
|
表: 参数 MC_BR_InitAutPar
本节的主题: