下图显示了一个标准,定义了当该轴有多个功能块 "同时 "活动时,该轴在最高级别上的优先行为。这种对不同运动类型的概述对于创建更复杂的运动序列和处理程序中的错误情况是有帮助的。
基本的经验法则是,运动命令总是按顺序执行的,即使控制器能够进行真正的并行处理。这些命令会影响轴的状态图。
轴总是处于定义的状态之一(见状态图)。每个运动指令都是一个过渡(触发轴状态改变),它改变了轴的状态,随后影响到当前运动的计算方式。
这个图是基于一个单轴的。从状态图的角度来看,多轴功能块 MC_CamIn、 MC_GearIn 和 MC_Phasing 可以被视为在某些状态下的多个单轴;例如,凸轮主轴可以处于 连续运动 状态,而相关的从轴则处于 同步运动 状态。将一个从轴耦合到一个主轴,对主轴没有影响。
在状态图中没有出现的功能块不影响轴的状态。
当前的轴状态可以通过 MC_ReadStatus 功能块来确定 。如果一个功能块在不被允许的轴状态下调用,那么它将报告错误 29238:无法在当前的PLCopen状态下使用功能块。
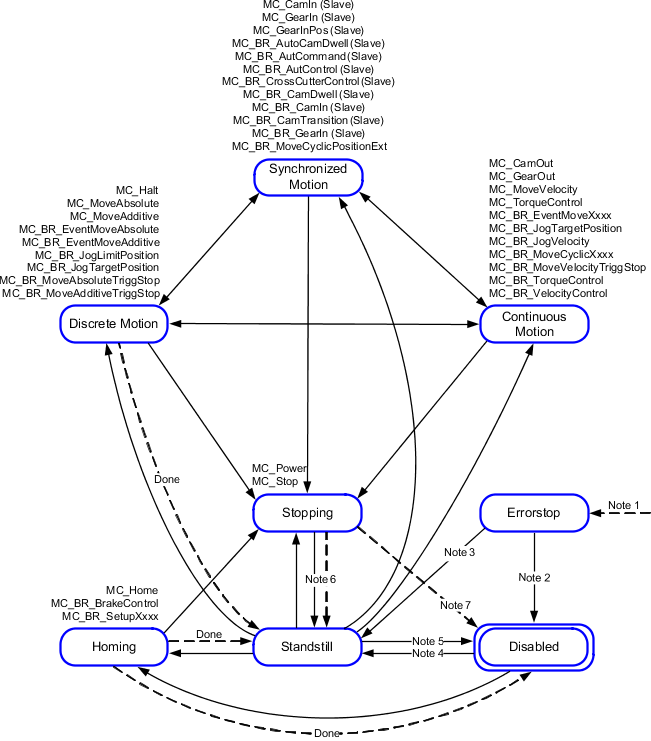
图: 状态图
关键点
Note 1 |
|
在任何状态下。轴上发生了一个错误。 |
Note 2 |
|
MC_Reset 和 MC_Power.Status = FALSE |
Note 3 |
|
MC_Reset 和 MC_Power.Status = TRUE 和MC_Power.Enable = TRUE |
Note 4 |
|
MC_Power.Enable = TRUE 和 MC_Power.Status = TRUE |
Note 5 |
|
MC_Power.Enable = FALSE |
Note 6 |
|
MC_Stop.Done = TRUE 和 MC_Stop.Execute = FALSE |
Note 7 |
|
在运动过程中MC_Power.Enable = FALSE ,在斜坡减速停止后 |
PLCopen轴的状态
禁用状态
•该状态表示内部初始化已成功完成,轴伺服控制器处于关闭状态。
•此状态不存在于虚轴;对于虚轴,在成功初始化后进入 静止状态 。
静止状态
•该状态表示轴伺服控制器已打开,可以开始运动。
•对于虚轴,该状态表示可以开始运动。
虚轴没有控制器。
回零状态
•该状态表示轴正在执行回零动作流程中,或者是一个设置功能块或抱闸制动测试正在进行。一旦该动作流程完成,轴会自动切换回 Standstill 或 Disabled 状态。
•根据回零模式的不同,轴在这种状态下保持的时间可能会有很大变化(比如立即回零模式和带有运动的回零模式)。
ErrorStop错误停止状态
•该状态表示发生了一个致命的错误,导致轴的运动停止。
• 可以使用MC_ReadAxisError 和 MC_BR_ReadAxisError 功能块来读取错误编号和错误文本,以确定错误的原因。
•在这种PLCopen轴的状态下不能开始运动。
• 必须调用 MC_Reset 功能块来退出这个错误状态。根据伺服控制器的状态,轴将改变为 禁用 (控制器关闭)或 静止 (控制器开启)状态。
•如果 MC_Reset 在活动的紧急停止斜坡期间被调用,那么轴将保持在 ErrorStop 状态,直到减速斜坡的结束。在这之后,状态会被改变。
MC_Reset 在减速斜坡期间报告 "Busy",只有在它完成后才报告 "Done"。
以下是一些可能导致过渡到ErrorStop状态的事件:
•轴的快停输入被启用。
•滞后错误
•直流母线电压错误(过压、断电等)。
•编码器错误
•在运动方向上应用硬件限位开关
•达到软件极限
•与驱动器失去通信
•电机、制动电阻、功率半导体等的温度过高
• 使能输入端失去 24V电压
•两个限位开关都应用
•电机参数丢失
•编码器错误(没有编码器信号,线路干扰等)。
•抱闸制动:低电压/低电流
•抱闸制动:控制信号打开,输出状态关闭
•抱闸制动:制动输出激活,但电机数据中没有指定抱闸
•抱闸制动:控制信号关闭,输出状态开启
•无效的 PHASING_MODE
•电源单元的X5电机连接有问题(无电流,接地故障,短路等)。
•与X3电源的连接出现错误(直流母线电压超出公差范围)
•启动事件发生,硬件限位开关在运动方向上应用
停止状态
•该状态表示轴根据命令正在停止中。
•在这种PLCopen轴状态下,不能开始其它运动。
•如果状态转换到 停止状态 是由 MC_Stop 触发 的,那么在MC_Stop "执行 "输入被设置为FALSE之前,轴一直处于这种状态。
离散运动状态
•该状态表示轴正在执行一个运动,当达到某个位置时将会停止。(比如相对定位,或者是绝对定位)
•如果用 MC_Halt停止 ,轴将保持在这个状态,直到达到静止状态。
连续运动状态
•该状态表示轴正在执行一个连续运动,该运动将持续到被另一个命令停止或中止。(比如正向恒速运行,或者是点动)
•轴也可以在速度为 "0 "时保持这种状态。
同步运动状态
•该状态表示轴(从属)与另一轴(主)相耦合。
•从轴静止(无运动)在此状态下表示
•另一个轴(主轴)没有进行运动 或
•没有启动信号(在从轴或功能块上) 或
•当前的凸轮和补偿参数都没有导致运动