该功能块根据 状态图返回当前激活的运动的详细状态 。
使用要求
允许启用该功能块的PLCopen轴状态:
•所有PLCopen轴状态,对PLCopen轴状态没有影响
功能块
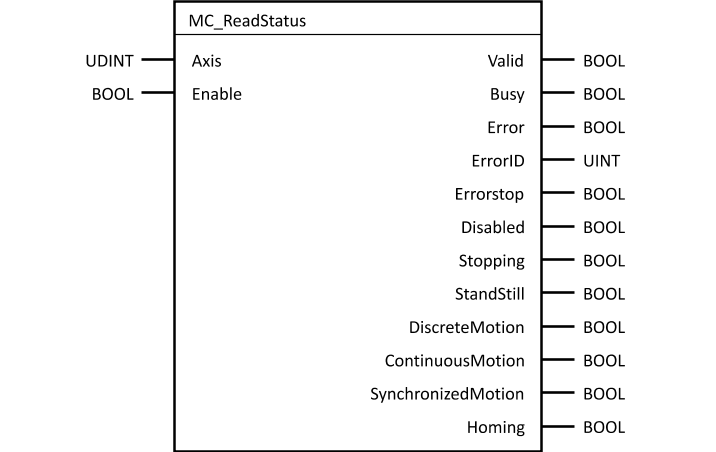
参数
输入/输出 |
参数 |
数据类型 |
说明 |
|
B |
IN |
UDINT |
轴对象引用 |
|
B |
IN |
BOOL |
启用时不断读取轴的状态 |
|
E |
OUT |
Valid |
BOOL |
可以使用该功能块的输出值。 这些输出是有效的. |
E |
OUT |
Busy |
BOOL |
该功能块处于激活状态,必须持续调用。 |
B |
OUT |
Error |
BOOL |
执行过程中出错 |
E |
OUT |
ErrorID |
UINT |
|
B |
OUT |
Errorstop |
BOOL |
|
B |
OUT |
Disabled |
BOOL |
MC_Power 还没有启用轴控制器,或者 MC_Reset 已经确认了一个错误 ,而控制器仍然处于关闭状态。 见 状态图。 |
B |
OUT |
Stopping |
BOOL |
|
B |
OUT |
StandStill |
BOOL |
|
B |
OUT |
DiscreteMotion |
BOOL |
由于以下功能块之一,一个运动被激活: MC_BR_EventMoveAbsolute ("Mode" = mcONCE) MC_BR_EventMoveAdditive ("Mode" = mcONCE) 见 状态图。 |
B |
OUT |
ContinuousMotion |
BOOL |
由于以下功能块之一,一个运动被激活: MC_BR_EventMoveAbsolute ("Mode" = mcCYCLIC 或 mcCYCLIC_ALL_EVENTS) MC_BR_EventMoveAdditive ("Mode" = mcCYCLIC 或 mcCYCLIC_ALL_EVENTS) 在调用以下一个功能块后,轴也会切换到这个状态。 见 状态图。 |
E |
OUT |
SynchronizedMotion |
BOOL |
由于以下功能块之一,一个运动被激活: |
E |
OUT |
Homing |
BOOL |
表:参数 MC_ReadStatus
本节的主题:
• 错误代码 |