该功能块将轴切换到 "循环位置设定 "模式,并初始化连接的运动参数。如果循环位置设置处于活动状态,轴的状态将变为 连续运动。
使用要求
•该功能块只能在SG4目标系统上使用。
允许启用该功能块的PLCopen轴状态
•静止状态
•离散运动
•连续运动
功能块
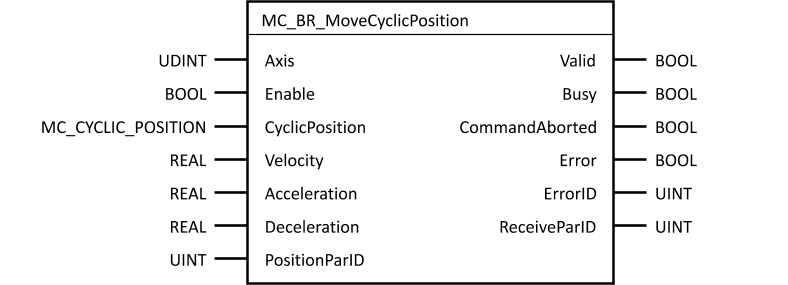
参数
输入/输出 |
参数 |
数据类型 |
说明 |
IN |
UDINT |
轴对象引用 |
|
IN |
BOOL |
启用轴位置的循环设定 |
|
IN |
CyclicPosition |
MC_CYCLIC_POSITION |
循环位置 |
IN |
Velocity |
REAL |
最大速度[轴单位/秒] |
IN |
Acceleration |
REAL |
最大加速度[轴单位/秒] |
IN |
Deceleration |
REAL |
最大减速度[轴单位/秒2] |
IN |
PositionParID |
UINT |
读取循环设定位置的ParID(轴单位!)。 |
OUT |
Valid |
BOOL |
命令已执行 初始化完成,位置正在循环传输 |
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须继续调用。 |
OUT |
CommandAborted |
BOOL |
功能块被另一个功能块中止了 |
OUT |
Error |
BOOL |
执行过程中出错 |
OUT |
ErrorID |
UINT |
|
OUT |
ReceiveParID |
UINT |
接收轴的位置的ParID (MAx_CYCLIC_POS) |
表: 参数 MC_BR_MoveCyclicPosition
MC_CYCLIC_POSITION 数据类型
参数 |
数据类型 |
描述 |
Integer |
DINT |
位置的整数值[PLCopen单位] |
Real |
REAL |
高分辨率位置的浮点值或小数点后的部分[PLCopen单位] |
本节的主题: