该功能块将轴切换到 "循环速度设置cyclic velocity setting"模式,并初始化连接的运动参数。
使用要求
•此功能块只能在SG4目标系统上使用。
•该功能块只能用于POWERLINK网络上的轴。
•本功能块只能用于实轴的轴对象引用。
•轴的位置控制器在该功能块启用前("启用"=TRUE)和禁用后运行。因此,保守的控制器参数(初始参数模块)必须用于所有可能的负载情况。
•每个轴只能使用一个实例。
•控制器参数不允许用 MC_BR_InitAxisSubjectPar 功能块进行初始化。
•如果该功能块与ACP10SIM轴一起使用,必须设置仿真模式为"完全"。
允许启用该功能块的PLCopen轴状态
•静止
功能块
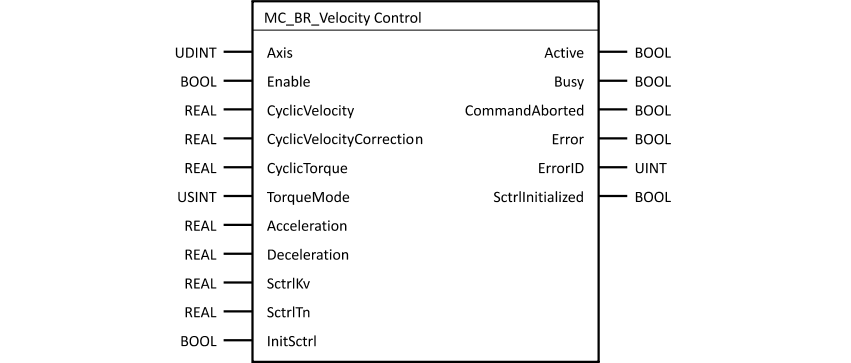
参数
输入/输出 |
参数 |
数据类型 |
说明 |
IN |
UDINT |
轴对象引用 |
|
IN |
BOOL |
启用功能块 |
|
IN |
CyclicVelocity |
REAL |
有符号的轴的速度设定点[轴单位/秒] |
IN |
CyclicVelocityCorrection |
REAL |
有符号的修正速度[轴单位/秒] |
IN |
CyclicTorque |
REAL |
用于前馈或扭矩限制的扭矩[Nm] |
IN |
TorqueMode |
USINT |
指定如何使用 "CyclicTorque "输入的值 mcFF... 扭矩前馈控制(前馈) mcLIMIT...扭矩限制 |
IN |
Acceleration |
REAL |
设定值发生器的最大加速度[轴单位/秒] |
IN |
Deceleration |
REAL |
设定值发生器的最大减速度[轴单位/秒] |
IN |
SctrlKv |
REAL |
在功能块的活动阶段,速度控制器的比例增益[As]。 注意: 当功能块被禁用时,该值将被重置为旧值。 |
IN |
SctrlTn |
REAL |
在功能块的激活阶段,速度控制器的I-元件的积分动作时间[s]。 注意: 当功能块被禁用时,该值将被重置为旧值。 |
IN |
InitSctrl |
BOOL |
在上升沿初始化 "SctrlKv "和 "SctrlTn "输入的数据 注意: 这可以通过Enable一起启用,以便在功能块启用时,参数可以包括在传输权中。 注意: 在 "Enable"=TRUE之前,参数不会被发送。 |
OUT |
Active |
BOOL |
功能块处于激活状态,可以执行动作 |
OUT |
Busy |
BOOL |
该功能块处于激活状态,必须持续调用。 |
OUT |
CommandAborted |
BOOL |
功能块被另一个功能块终止 |
OUT |
Error |
BOOL |
执行过程中出错 |
OUT |
ErrorID |
UINT |
|
OUT |
SctrlInitialized |
BOOL |
来自 "SctrlKv "和 "SctrlTn "输入的数据被初始化 |
本节的主题: