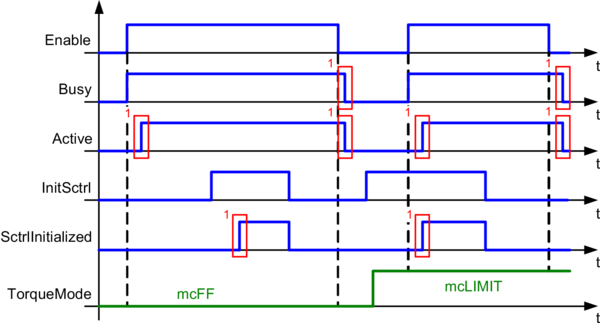
只要 "Enable "输入被设置为 "TRUE","Busy "输出就被设置为 "TRUE"。然后,该功能块将 "CyclicVelocity"、"CyclicVelocityCorrection "和 "CyclicTorque "输入循环地传输给驱动器。
一旦所有参数被成功传输到驱动器并启用功能 ,"Active "输出就被设置为 "TRUE" 。 在PLCopen功能块的激活或非激活状态下 , "InitSctrl "输入都可以被设置为 "TRUE" 。SctrlKv和SctrlTn的值不会被传输,直到 "Enable "输入也被设置为 TRUE。 在速度控制器的参数被传输到ACOPOS设备后,"SctrlInitialized "输出被设置为 TRUE。
只有当 "Enable "输入被设置为 FALSE时,"TorqueMode "输入才能被改变 。
当 "Enable "输入的状态改变时,"Acceleration "和 "Deceleration "输入被应用。
如果 "Enable "输入被设置为 "FALSE",那么驱动器上的功能将被重置,速度控制器的设置Kv和Tn将以其原始值初始化。在旧参数完全恢复之前,"激活 "和 "繁忙 "输出不会被重置。
此外,运动结束,循环功能块的输入值被忽略。零值将被发送到驱动器,或者扭矩参数配置被禁用。
扭矩模式输入
这个输入可以设置两种模式:
•mcFF ...前馈扭矩控制。指定的 "CyclicTorque "在此作为一个附加的扭矩设定点,例如,它可以用来施加张力。
•mcLIMIT ... 扭矩限制。指定的 "CyclicTorque "在这里作为一个限制性的扭矩设定点。电机在加速时不会超过这个扭矩限制值。例如,可以用来降低速度控制运动的最大扭矩,而不需要额外的调用其它功能块(如 MC_LimitLoad)。