该功能块可用于对指定轴的加速扭矩进行限制。这个限制也可以在一个激活的运动中启用或禁用。可以对运动的正方向、负方向或两个方向的限制进行启用。
信息: 该功能对虚拟轴不可用。如果对一个虚拟轴调用该功能,该功能块将返回错误 29235: 该功能对当前轴类型不可用 |
使用要求
允许启用该功能块的PLCopen轴状态
所有PLCopen轴状态,对PLCopen轴状态没有影响
信息:
该功能块对SDC接口的轴不起作用。 |
信息:
该功能块对 MC_BR_VelocityControl的 "TorqueMode"= mcFF所指定的扭矩没有影响 。 |
功能块
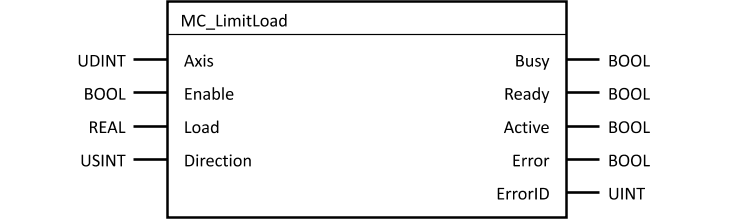
参数
输入/输出 |
参数 |
数据类型 |
描述 |
|
B |
IN |
UDINT |
轴对象引用 |
|
B |
IN |
BOOL |
只要这个输入被设置,该功能块就处于活动状态。 |
|
B |
IN |
Load |
REAL |
加速扭矩的限制值 [Nm] |
E |
IN |
Direction |
USINT |
加速扭矩受到限制的运动方向: mcPOSITIVE_DIR ... 0 mcNEGATIVE_DIR ... 1 mcCURRENT_DIR ... 2 注意: 这只在 "Enable "输入的上升沿应用。 |
E |
OUT |
Busy |
BOOL |
该功能块处于激活状态,必须持续调用 |
V |
OUT |
Ready |
BOOL |
限幅器初始化成功,"负载 "输入的数值正在循环传输。 |
B |
OUT |
Active |
BOOL |
限制是激活的。 |
B |
OUT |
Error |
BOOL |
执行过程中出错 |
E |
OUT |
ErrorID |
UINT |
表:参数 MC_LimitLoad
本节的主题: