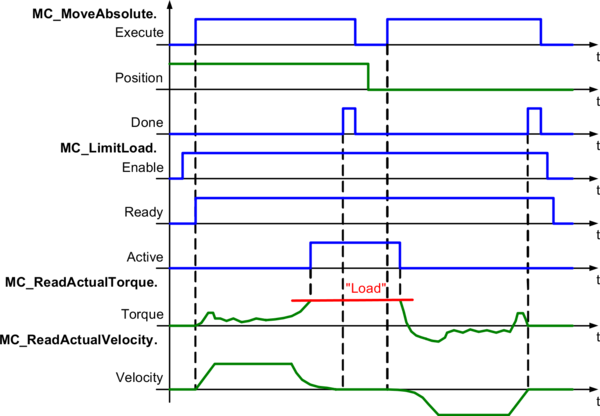
一个轴应该在其正端点以一个确定的力压在机械极限上。使用 MC_LimitLoad,轴的扭矩被限制在与这个力相对应的值 。 MC_MoveAbsolute 功能块的一个实例 被用来将轴移动到Position=1000。这个位置稍微超出了机械极限。
当达到机械极限时, MC_MoveAbsolute在内部计算的位置设定点达到目标位置时返回 "Done=TRUE"。
然后在Position=0的情况下调用 MC_MoveAbsolute, 使轴向后移动,远离机械极限。当这个运动完成后,通过将 MC_LimitLoad 的 "Enable "输入设置 为 FALSE, 扭矩限制被禁用 。