This function block has similar properties as the MC_BR_CamDwell function block. The difference is that a cam does not have to be specified for MC_BR_AutoCamDwell.
Requirements for use
•Function block name for SG3/SGC target systems MC_038BR_AutoCamDwell
•This coupling can only be started if the master axis is moving in the positive direction!
•It is not permitted to home the specified axis while the function block is active.
•Axis states of the slave axis in which this function block can be used:
Function block
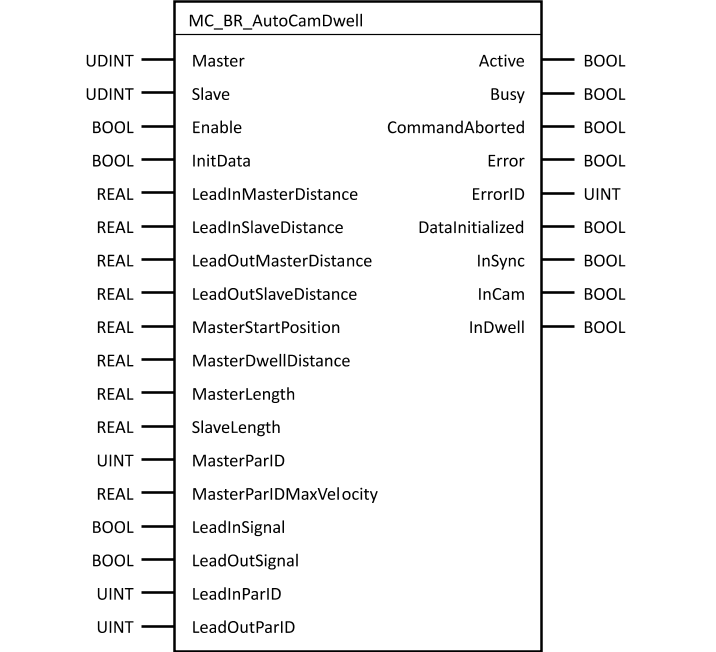
Parameter
I/O |
Parameter |
Data type |
Description |
IN |
Master |
UDINT |
Master axis reference |
IN |
Slave |
UDINT |
Slave axis reference |
IN |
BOOL |
The function block is active as long as this input is set. |
|
IN |
InitData |
BOOL |
Initializes input data on a rising edge (online change of function block input data) |
IN |
LeadInMasterDistance |
REAL |
Compensation distance of master axis for the lead-in movement [PLCopen units of master] |
IN |
LeadInSlaveDistance |
REAL |
Compensation distance of slave axis for the lead-in movement [PLCopen units of slave] |
IN |
LeadOutMasterDistance |
REAL |
Compensation distance of master axis for the lead-out movement [PLCopen units of master] |
IN |
LeadOutSlaveDistance |
REAL |
Compensation distance of slave axis for the lead-out movement [PLCopen units of slave] |
IN |
MasterStartPosition |
REAL |
Position within the period of the master axis or absolute position for a non-periodic master axis for beginning the cam [PLCopen units of master] Note: If "MasterParID" is used, no new value is calculated internally when restarting. This means that if the master position can overflow from the positive to the negative range of values, this value should be recalculated before each start. Otherwise, it is possible that re-coupling will not take place until the positive master start position is reached. |
IN |
MasterDwellDistance |
REAL |
Length of an optional standstill phase of slave axis [PLCopen units of master] on the master side. If this value is set to 0, the automatically calculated cam is immediately started again. |
IN |
MasterLength |
REAL |
Length of the automatically calculated cam on the master side [PLCopen units of master] |
IN |
SlaveLength |
REAL |
Length of the automatically calculated cam on the slave side [PLCopen units of slave] |
IN |
MasterParID |
UINT |
This ParID is used instead of the position setpoint; 0…Use position setpoint Note: When using a value other than 0 (even if the position ParID), the PLCopen factor of the master axis is not applied to any of the parameters involving the master axis. |
IN |
MasterParIDMaxVelocity |
REAL |
Prior to V2.290: Maximum speed of the master ParID value, only evaluated if the MasterParID is used
V2.290 and higher: If this parameter is "0.0", the current velocity of the master axis is used. If a value is specified for "MasterParID": Maximum velocity of the master ParID value If a value is not specified for "MasterParID": Maximum velocity of the master axis [PLCopen units of master/s] Note: This value is used to calculate the compensating movement for coupling, changing the gear ratio or cams as well as between the cutting areas (depending on the function). This parameter has a considerable effect on the occurrence of ACOPOS error 37113: "Cam compensation gear: Limit values exceeded". No value specified: A master speed that changes or a parameter update via "InitData" or "Execute" can result in different, automatically calculated motion profiles. Value specified: Specifying the maximum speed value of the master axis that is achieved while coupled to the slave axis results in a motion profile that is always automatically calculated the same. |
IN |
LeadInSignal |
BOOL |
Signal from the controller to start the lead-in movement |
IN |
LeadOutSignal |
BOOL |
Signal from the controller to start the lead-out movement |
IN |
LeadInParID |
UINT |
ParID that can be used by the drive to start the lead-in movement when the value changes from 0 to a value ≠ 0 |
IN |
LeadOutParID |
UINT |
ParID that can be used by the drive to start the lead-in movement when the value changes from 0 to a value ≠ 0 |
OUT |
Active |
BOOL |
Function block active, possible to execute movements Waiting for a lead-in signal. |
OUT |
Busy |
BOOL |
The function block is active and must continue to be called. |
OUT |
CommandAborted |
BOOL |
Function block aborted by another function block |
OUT |
Error |
BOOL |
Error during execution |
OUT |
ErrorID |
UINT |
|
OUT |
DataInitialized |
BOOL |
Changes to function block inputs initialized |
OUT |
InSync |
BOOL |
The coupling is synchronized with the master, will be reset as soon as the lead-out movement is started. |
OUT |
InCam |
BOOL |
Coupling in cam range |
OUT |
InDwell |
BOOL |
Coupling in standstill range |
Table: Parameter MC_BR_AutoCamDwell
Topics in this section: