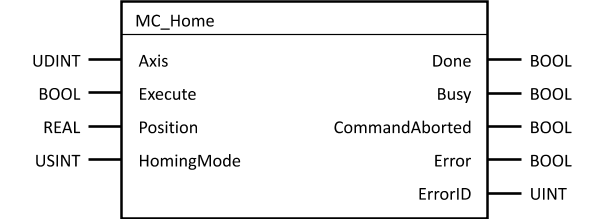
该功能块对一个轴进行回零。如果选择的 "回零模式 "需要一个回零动作流程,它也将由该功能块启动。
信息: 对于虚轴,该功能块只能用这些回零模式 mcHOME_DEFAULT、 mcHOME_DIRECT、 mcHOME_AXIS_REF 或 mcHOME_RESTORE_POS。在所有其他情况下,它将报告错误 29217:无效的输入参数。 |
使用要求
允许启用该功能块的PLCopen轴状态
功能块
参数
I/O |
参数 |
数据类型 |
描述 |
|
B |
IN |
UDINT |
轴对象引用 |
|
B |
IN |
BOOL |
该功能块在该输入的上升沿开始执行。 |
|
B |
IN |
Position |
REAL |
检测到参考点信号后的绝对位置[PLCopen单位] 。 注意: 在 mcHOME_RESTORE_POS 和 mcHOME_AXIS_REF模式下 ,该输入端位置不会被应用。 |
E |
IN |
HomingMode |
USINT |
回零模式: mcHOME_DEFAULT (除了 "位置 "外的所有参数都从初始参数模块应用)。 mcHOME_ABSOLUTE (绝对编码器的偏移量) mcHOME_ABSOLUTE_CORR (带计数范围修正的绝对值编码器的偏移量) mcHOME_DCM (距离编码的参考标记) mcHOME_DCM_CORR( 带计数范围修正的距离编码参考标记) mcHOME_RESTORE_POS (从永久内存恢复位置,见 MC_BR_InitEndlessPosition) mcHOME_AXIS_REF( 用轴结构的参数回零) (V2.210 及以后版本) mcHOME_BLOCK_TORQUE (回零到机械极限位)(V2.360 及以后版本)。 mcHOME_BLOCK_DS( 回零到机械极限位)(V2.360及以后版本)。 |
B |
OUT |
Done |
BOOL |
执行成功。功能块已经完成。 |
E |
OUT |
Busy |
BOOL |
该功能块处于激活状态,必须继续被调用。 |
E |
OUT |
CommandAborted |
BOOL |
功能块被另一个功能块中止了 |
B |
OUT |
Error |
BOOL |
执行过程中发生错误 |
E |
OUT |
ErrorID |
UINT |
表:参数 MC_Home
本节的主题: