Effect of "VelFactor"的作用
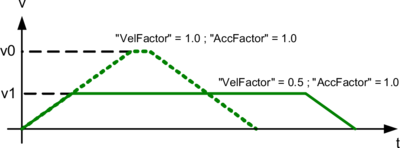
注意事项! 允许 "VelFactor "的覆盖系数为0.0,但轴将保持静止状态而不切换到 Standstill 状态! |
"AccFactor"的作用
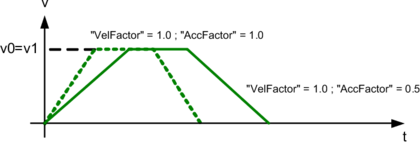
注意事项! "AccFactor "的值不允许的设置为0.0! |
|
<< 点击显示目录 >> 主页 轴控开发使用手册 > ACP10/ARNC0帮助信息 > ACP10_MC运动库 > 分类的功能块 > 基础运动 > MC_SetOverride > "VelFactor" 和 "AccFactor"的作用 |
注意事项! 允许 "VelFactor "的覆盖系数为0.0,但轴将保持静止状态而不切换到 Standstill 状态! |
注意事项! "AccFactor "的值不允许的设置为0.0! |