该功能块设置速度和加/减速度的覆写参数override parameters (乘法系数)的值。
默认的覆写值是1.0(100%)。最大是2.0(200%)。
使用要求及操作的相关说明
•必须遵守轴的极限值!如果由于覆写系数而超过了轴的极限值,活动的运动功能块(或应该开始运动的功能块)将报告一个错误(无效的参数或极限值的违反)!
•如果 MC_SetOverride 功能块 的 "VelFactor "值 ≠"1.0",那么如果用这个功能块开始一个新的运动,MC_MoveVelocity 功能块将不会设置 "InVelocity "输出。
•如果 MC_SetOverride 功能块 的 "VelFactor "值 ≠"1.0",那么如果通过功能块 MC_GearOut 或 MC_CamOut 中止了轴耦合,从轴的速度将被增加或减少 。
•如果 MC_SetOverride 功能块 的 "VelFactor "值为 "1.0",那么在使用 MC_BR_VelocityControl、 MC_BR_MoveCyclicVelocity 或 MC_BR_MoveCyclicVelocityExt 时将会报错 , 因为这里的极限值是作为默认运动参数使用的。
允许启用该功能块的PLCopen轴状态
•除 停止, Errorstop错误停止, 回零 和 禁用 以外的全部状态
功能块
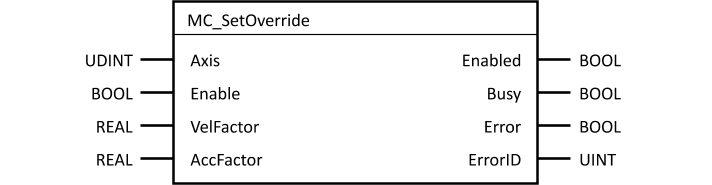
参数
输入/输出 |
参数 |
数据类型 |
描述 |
|
B |
IN |
UDINT |
轴对象引用 |
|
B |
IN |
BOOL |
设置时不断写入一个新的覆写系数 |
|
B |
IN |
VelFactor |
REAL |
速度的新覆写系数 值的范围:0.0 - 2.0 分辨率:0.0001 注意: 允许 "VelFactor "的覆盖系数为0.0,但轴将保持静止状态而不切换到 Standstill 状态! |
E |
IN |
AccFactor |
REAL |
加速度/减速度的新覆写系数 值的范围:0.0001 - 2.0 分辨率:0.0001 注意: AccFactor "的值不允许的设置为0.0! |
B |
OUT |
Enabled |
BOOL |
覆盖被不断写入 |
E |
OUT |
Busy |
BOOL |
该功能块处于激活状态,必须持续调用。 |
B |
OUT |
Error |
BOOL |
执行过程中出错 |
E |
OUT |
ErrorID |
UINT |
表:参数 MC_SetOverride
本节的主题: