该功能块用于指定一个轴的速度设定值。与 MC_BR_MoveCyclicVelocity不同的是,该功能块提供了以下附加功能:
•可以直接设置速度接收值的插值模式。
•ParID的值可以加到驱动器的循环值上。
•可以禁用驱动器上的抖动限制。
使用要求
•该功能块只能在SG4目标系统上使用。
允许启用该功能块的PLCopen轴状态
•静止状态
•离散运动
•连续运动
功能块
参数
输入/输出 |
参数 |
数据类型 |
说明 |
IN |
UDINT |
轴对象引用 |
|
IN |
BOOL |
启用轴速度的循环设定 |
|
IN |
CyclicVelocity |
REAL |
循环速度[PLCopen单位/秒] |
IN |
Direction |
USINT |
运动方向:
注意: 如果使用 "AdvancedParameters.SetValueParID",则不能指定方向。 |
IN |
InterpolationMode |
USINT |
接收值的插值模式: mcIPL_OFF...0 mcIPL_LINEAR... 1 mcIPL_QUADRATIC... 2 mcIPL_QUADRATIC_NO_OVERSHOOT... 4
注意: ACOPOS驱动器的默认设置是 mcIPL_LINEAR。 |
IN |
AdvancedParameters |
MC_ADVANCED_MOVE_CYC_REF |
使用高级功能的结构 注意: 参数设置为 "0",将禁用相关的高级功能。 |
OUT |
Valid |
BOOL |
命令已执行 初始化完成,速度正在循环传输 |
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须继续调用。 |
OUT |
CommandAborted |
BOOL |
功能块被另一个功能块中止了 |
OUT |
Error |
BOOL |
执行过程中出错 |
OUT |
ErrorID |
UINT |
|
OUT |
ReceiveParID |
UINT |
接收轴的速度的ParID (MAx_CYCLIC_POS) |
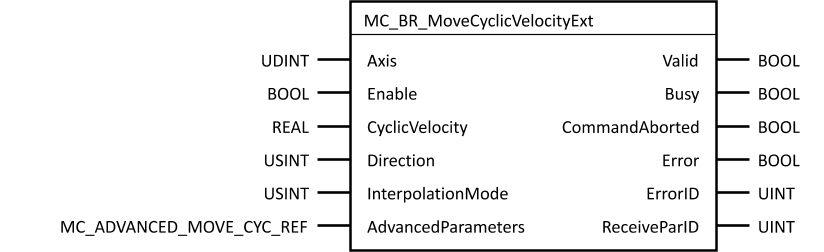
表: 参数 MC_BR_MoveCyclicVelocityExt
MC_ADVANCED_MOVE_CYC_REF 数据类型
参数 |
数据类型 |
描述 |
Velocity |
REAL |
该参数不用于该功能块。 |
Acceleration |
REAL |
最大加速度[PLCopen单位/S2] 注意: 如果 在这个输入端上指定了一个 ≤ 0的值 ,那么就会使用轴结构中的轴的极限值(limit.parameter.a1_pos或a1_neg)。 这个输入的值可以高于轴结构的极限值(limit.parameter.a1_pos或a1_neg)。 |
Deceleration |
REAL |
最大加速度 [PLCopen单位/S2] 注意: 如果 在此输入中指定的数值 ≤ 0,则使用轴结构中的轴的极限值(limit.parameter.a2_pos或a2_neg)。 该输入值可以高于轴结构的极限值(limit.parameter.a2_pos或a2_neg)。 |
SetValueParID |
UINT |
读取循环速度的ParID[轴单位/秒] 注意: 如果这里指定了一个ParID,那么将读取该ParID的设定值,而忽略 "循环速度 "输入。 如果该参数为 "0",则使用 "循环速度 "输入的设定值。 |
AdditiveParID |
UINT |
ParID的值被叠加到循环速度设定值中(轴单位/秒)。 注意: 如果该参数为 "0",则不会向设定值添加额外的值。 |
DisableJoltTime |
BOOL |
FALSE ...在设定值生成过程中,驱动器上的抖动限制被启用。 TRUE ...在设定值生成过程中禁用驱动器上的抖动限制。 注意: 只有在计算循环设定点时包含了抖动限制的情况下,才应该且只能对实轴禁用。 |
CoordinatedMovement |
BOOL |
该参数不用于该功能块。 |
DisableJoltTimeAtEnd |
BOOL |
FALSE ...当复位 "启用 "时,驱动装置上的抖动限制依然被启用。 TRUE ...当复位 "启用 "时,驱动装置上的抖动限制被禁用。 注意: 该配置选项在 V3.170 及以后版本或 V2.523-V2.999中可用 。 |
本节的主题: