mcDIR_DEPENDENT, mcDIR_DEPENDENT_AX_POS
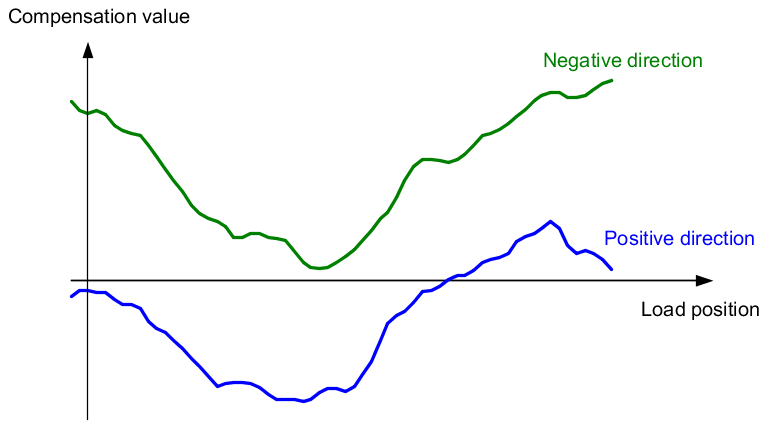
Depending on the direction of movement of the axis, either the data from "DirectionDependent.CompDataPos.AdrPositions/AdrDeviations" or ".CompDataNeg.AdrPositions/AdrDeviations" is used.
These modes are based on a backlash monitor. Undesired movements between edges can occur at a standstill. For this reason, mode mcDIR_DEPENDENT_SET_POSITION or mcDIR_DEPENDENT_SET_POS_AX_POS is recommended in many cases (e.g. with most machine tools).
mcDIR_DEPENDENT_SET_POSITION, mcDIR_DEPENDENT_SET_POS_AX_POS
Depending on the direction of movement of the axis, either the data from "DirectionDependent.CompDataPos.AdrPositions/AdrDeviations" or ".CompDataNeg.AdrPositions/AdrDeviations" is used.
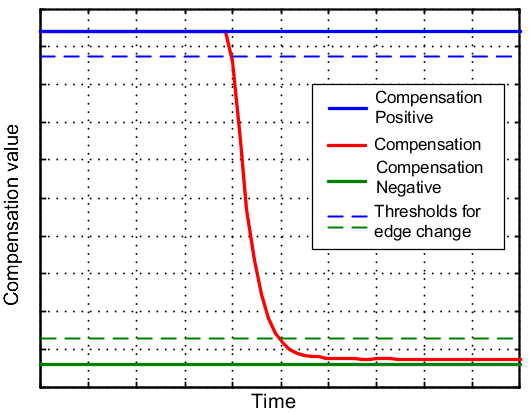
The edge change takes place with maximum velocity ".MaxVelocity". In addition, the edge change can be optimized using parameters ".TimeConstant" and ".NoiseLimit".
mcDIR_DEPENDENT_BACKLASH, mcDIR_DEPENDENT_BACKLASH_AX_POS
Depending on the direction of movement of the axis, either the data from "DirectionDependent.CompDataPos.AdrPositions/AdrDeviations" or ".CompDataNeg.AdrPositions/AdrDeviations" is used.
In addition, the edge change for backlash is optimized using the ".TimeConstant", ".Inertia" and ".NoiseLimit" parameters.
These modes should only be used in the event of a large working cycle and high amount of friction on the load side. In all other cases, mode mcDIR_DEPENDENT_SET_POSITION or mcDIR_DEPENDENT_SET_POS_AX_POS is recommended (e.g. for most machine tools).
mcDIR_INDEPENDENT, mcDIR_INDEPENDENT_AX_POS
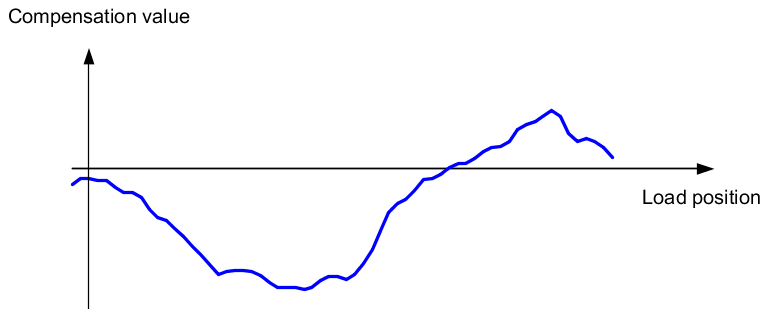
Regardless of the direction of movement of the axis, the data from "DirectionIndependent. CompData.AdrPositions/AdrDeviations" is used.
mcDIR_INDEPENDENT_SPEED, mcDIR_INDEPENDENT_SPEED_AX_POS
Regardless of the direction of rotation of the axis, the data from "DirectionIndependent.CompData.AdrPositions/AdrDeviations" is used.
Correction also takes place in the speed controller (in other modes, only in the position controller). This correction value can be smoothed with ".FilterTime".