This function performs compensation for mechanically-based position deviations.
Examples of compensating for mechanically-based position deviations:
•Spindle pitch error and backlash compensation
•Encoder scale correction
Depending on whether the error to be compensated depends on the direction or not, one or two data sets with the measured deviations are necessary.
If a constant backlash should be compensated for, it is sufficient to specify the value of the backlash distance under "Parameters.DirectionDependent.ConstantBacklash".
Requirements for use
•This function block can only be used with an axis reference for a real axis.
•This function block performs extensive calculations that may cause cycle times to be exceeded in fast task classes on some target systems!
•Before this function block is enabled, the axis must be referenced in the same way as with the measurements of the deviations.
•It is not permitted to home the specified axis while the function block is active.
•Each list passed to this function block is permitted to hold up to 1000 items.
•PLCopen axis states in which the function block is permitted to be enabled
Function block
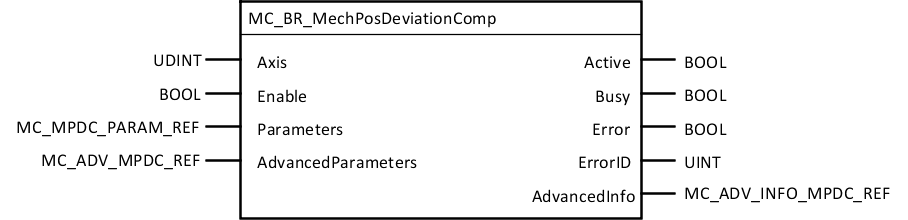
Parameter
I/O |
Parameter |
Data type |
Description |
IN |
UDINT |
Axis reference |
|
IN |
BOOL |
The function block is active as long as this input is set. |
|
IN |
Parameters |
MC_MPDC_PARAM_REF |
Input parameters required for operation |
IN |
AdvancedParameters |
MC_ADV_MPDC_REF |
Additional input parameters for optional use with the function block. |
OUT |
Active |
BOOL |
Function block enabled, performing spindle pitch and backlash compensation |
OUT |
Busy |
BOOL |
The function block is active and must continue to be called. |
OUT |
Error |
BOOL |
Error during execution |
OUT |
ErrorID |
UINT |
|
OUT |
AdvancedInfo |
MC_ADV_INFO_MPDC_REF |
Structure with extended output information |
Table: Parameter MC_BR_MechPosDeviationComp
MC_MPDC_PARAM_REF data type
Parameter |
Data type |
Description |
Mode |
UINT |
Compensation mode: mcDIR_DEPENDENT_AX_POS (V5.040 and later) mcDIR_DEPENDENT_BACKLASH_AX_POS (V5.040 and later) mcDIR_DEPENDENT_SET_POS_AX_POS (V5.040 and later) mcDIR_INDEPENDENT_AX_POS (V5.040 and later) mcDIR_INDEPENDENT_SPEED_AX_POS (V5.040 and later) |
PositionSource |
UINT |
Source of the position for the compensation calculation: |
DirectionIndependent |
MC_MPDC_DIR_INDEPENDENT_REF |
Parameter for direction-independent compensation |
DirectionDependent |
MC_MPDC_DIR_DEPENDENT_REF |
Parameter for direction-dependent compensation |
Periodic |
BOOL |
Compensation data is interpreted periodically: mcNON_PERIODIC (default) |
MC_MPDC_COMP_DATA_REF data type
Parameter |
Data type |
Description |
AdrPositions |
UDINT |
Address of the list with positions, array of REAL [PLCopen units] |
AdrDeviations |
UDINT |
Address of the list with deviations, array of REAL [PLCopen units] |
NumberOfPoints |
UINT |
Number of points in the lists |
MC_MPDC_DIR_INDEPENDENT_REF data type
Parameter |
Data type |
Description |
CompData |
MC_MPDC_COMP_DATA_REF |
Data for the compensation |
FilterTime |
REAL |
Filter time constant for smoothing the speed correction value [s] Note: Only evaluated for "Mode" mcDIR_INDEPENDENT_SPEED |
MC_MPDC_DIR_DEPENDENT_REF
Parameter |
Data type |
Description |
ConstantBacklash |
REAL |
Constant mechanical backlash [PLCopen units] Note: If a value ≠ 0 is specified here, "CompDataPos" and "CompDataNeg" are ignored. Only values >0 are permitted. |
CompDataPos |
MC_MPDC_COMP_DATA_REF |
Data for compensation in the positive direction |
CompDataNeg |
MC_MPDC_COMP_DATA_REF |
Data for compensation in the negative direction |
StartFlank |
UINT |
Edge at which compensation is started: |
MaxVelocity |
REAL |
Maximum velocity when changing edges [PLCopen units/s] Note: Only used with "Mode" mcDIR_DEPENDENT and mcDIR_DEPENDENT_SET_POSITION. |
TimeConstant |
REAL |
Time constant of the exponential function for edge change [s] Note: Only used with "Mode" mcDIR_DEPENDENT_BACKLASH and mcDIR_DEPENDENT_SET_POSITION. |
NoiseLimit |
REAL |
Noise limit [%] Range of values: 0.0 … 1.0 Note: Only needed for "Mode" mcDIR_DEPENDENT_BACKLASH and mcDIR_DEPENDENT_SET_POSITION. |
Inertia |
REAL |
Moment of inertia in backlash [kgm2] Note: Only needed for "Mode" mcDIR_DEPENDENT_BACKLASH. Note: If 0.0 is specified, the default value MOTOR_INERTIA is used. |
MC_ADV_MPDC_REF
Parameter |
Data type |
Description |
DataObjectNamePos |
STRING(12) |
Name of the data object (cam) that is used as the data source in place of "CompData" or "CompDataPos". If a data object with this name does not exist on the PLC, it will be generated; the cam data calculated from "CompData" or "CompDataPos" is then saved there. |
DataObjectNameNeg |
STRING(12) |
Name of the data object (cam) that is used as the data source in place of "CompDataNeg". If a data object with this name does not exist on the PLC, it will be generated; the cam data calculated from "CompDataNeg" is then saved there. |
CamStartPosition |
REAL |
Axis position at which the cam begins [PLCopen units] |
CamStartPositionNeg |
REAL |
Axis position at which the cam begins in the negative direction [PLCopen units] |
CalcOnly |
BOOL |
FALSE: Performs calculations of cam data, if required, and starts compensation. TRUE: Only performs the calculation of the cam data and generates the cam data object. Compensation is not started. |
MC_ADV_INFO_MPDC_REF
Parameter |
Data type |
Description |
DataObjectIdentPos |
UDINT |
Ident of the data object with the name "DataObjNamePos" |
DataObjectIdentNeg |
UDINT |
Ident of the data object with the name "DataObjNameNeg" |
CamStartPosition |
REAL |
Axis position at which the cam begins [PLCopen units] |
CamStartPositionNeg |
REAL |
Axis position at which the cam begins in the negative direction [PLCopen units] |
CalcDone |
BOOL |
TRUE: The calculation of the cam data is completed. |
Period |
REAL |
Period of the cam profiles [PLCopen units] |
Topics in this section: