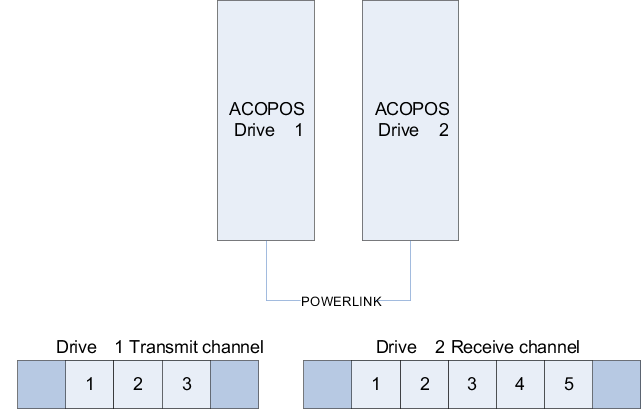
The following example illustrates two drives. The first drive transmits a position to the second drive. This drive uses the position as the "MasterParID" input for the Cam Profile Automat. Each ACOPOS unit has 3 transmit channels and 5 receive channels.
The "MasterParID" is transferred to the first available transmit channel on drive 1. The second drive receives the value of the "MasterParID" on one of its receive channels. Which of the 5 receive channels contains the value can be determined either by the user via the "SlaveChannel" input, or the function block decides on its own and takes the first available receive channel (if "SlaveChannel = 0"). Each receive channel corresponds with a ParID.
|
(Drive 2 receive channel #) |
ParID # |
ReceiveParID (Drive 2 receive channel #) |
0 |
|
Function block decides |
1 |
542 |
MA1_CYCLIC_POS |
2 |
543 |
MA2_CYCLIC_POS |
3 |
548 |
MA3_CYCLIC_POS |
4 |
902 |
MA4_CYCLIC_POS |
5 |
903 |
MA5_CYCLIC_POS |
If the transmit channel on the master axis is full, the FB reports the error 29227: No further master position can be sent on the network from this drive.
If all receive channels are full or if the requested "SlaveChannel" is already occupied, then the function block reports the error 29228: No further master position can be read from the network by this drive. All multi-axis function blocks (e.g. MC_GearIn, MC_CamIn, etc.) also use these transmit and receive channels. There is no way to determine which function block is using which channels. When the user is defining receive channels, it is best to call the MC_BR_InitMasterParIDTransfer function block before all other multi-axis function blocks.
The position received by a slave axis is delayed by 2 network cycles + 400 µs for the position controller cycle.