传输凸轮轮廓曲线并使用它来启动两个轴之间的耦合链接的例子。它显示了如何使用定义的命令来传输凸轮曲线到驱动器,然后使用预定义的凸轮曲线来启动两个轴之间的耦合链接。
来自 ACP10_mc 库的功能块 用于通过凸轮轮廓将一个轴(从轴)耦合链接到到相应的链接信号(主轴)。这个例子还包含驱动装置控制的基本功能。
为了用这个例子启动耦合,主轴必须准备好(打开控制器,回零)。这些功能可以用 单轴功能的例子来执行 。 |
使用这个例子时,必须在项目中找到一个名为 "acp10etxen"的错误文本模块。当使用运动向导插入一个轴时,可以在逻辑视图中重新命名错误文本模块的默认名称。
|
默认情况下,主轴使用"gAxis01"的名称,从轴使用"gAxis02"(运动向导配置)。要使用一个具有不同名称的轴,可以在初始化程序中指定。 |
要求
该例程可用于以下配置
目标系统 |
描述 |
X20CP148x |
X20 SG4 CPU |
8V1xxx.x0-2或8BVxxxxxxxx.xxx-x |
ACOPOS和ACOPOSmulti |
任务名称
Cam ; 链接两个轴的任务
profile ; Cam凸轮轮廓曲线文件
任务描述
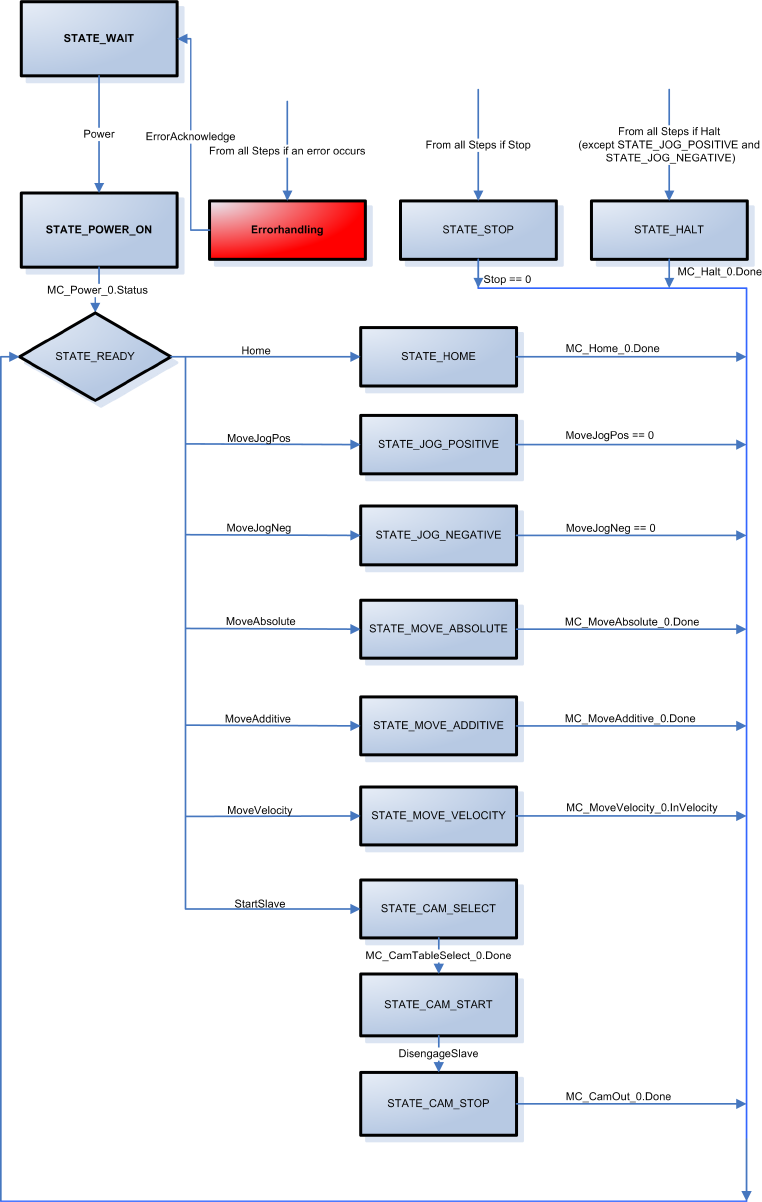
预定义命令结构变量 "CamControl.Command"可用于通过Automation Studio变量监视器窗口 启动以下功能。
功能 |
指令变量 |
开启从轴伺服控制器。 |
CamControl.Command.Power |
从轴回零。 |
CamControl.Command.Home |
从目标系统中选择一个凸轮轮廓,用于主从轴耦合链接。 在这个例子中,凸轮轮廓 "profile"已被指定,它包含在软件包中。 |
CamControl.Command.StartSlave |
启动主轴和从轴之间由轮廓曲线建立的耦合链接。 |
CamControl.Command.StartSlave |
结束从轴和主轴之间的耦合链接。 |
CamControl.Command.DisengageSlave |
只要命令变量被置位,就在从轴上执行一个正方向的运动。 |
CamControl.Command.MoveJogPos |
只要命令变量被置位,就在从轴上执行一个负方向的运动。 |
CamControl.Command.MoveJogNeg |
在从轴上以定义的终点位置启动一个绝对定位运动。 |
CamControl.Command.MoveAbsolute |
在从轴上以预定的路径启动一个相对定位运动。 |
CamControl.Command.MoveAdditive |
在从轴上以定义的速度启动一个恒速运动。 |
CamControl.Command.MoveVelocity |
停止一个活动的运动。 |
CamControl.Command.Halt |
停止一个正在进行的运动并阻止一个新的运动开始。 |
CamControl.Command.Stop |
确认一个已经发生的轴错误。 |
CamControl.Command.ErrorAcknowledge |