该功能块根据给定的凸轮cam、主/从拉伸系数和给定的从轴位置 来确定主轴位置。
使用要求
•用于SG3/SGC目标系统的功能块名称 MC_057BR_GetCamMasterPosition
•该功能块执行大量的计算,在某些目标系统的快速任务类中可能会导致周期时间被超过!
允许启用该功能块的PLCopen轴状态
•所有PLCopen轴状态,对PLCopen轴状态没有影响
功能块
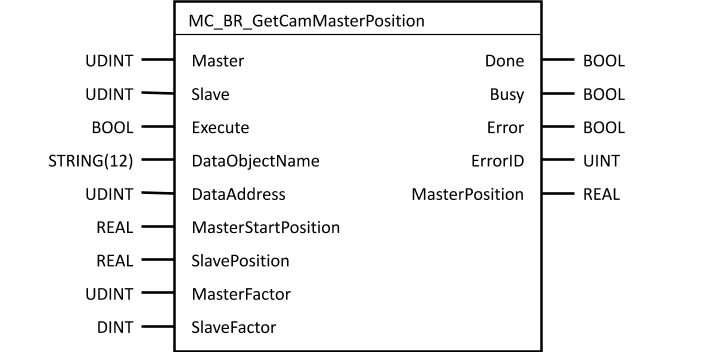
参数
输入/输出 |
参数 |
数据类型 |
说明 |
IN |
Master |
UDINT |
主轴 轴对象引用 |
IN |
Slave |
UDINT |
从轴 轴对象引用 |
IN |
BOOL |
该功能块在该输入的上升沿开始执行。 |
|
IN |
DataObjectName |
STRING[12] |
凸轮轮廓数据对象的名称 |
IN |
DataAddress |
UDINT |
凸轮数据的地址( MC_CAMPROFILE_TYP类型的变量 )。 |
IN |
MasterStartPosition |
REAL |
凸轮内的主轴起始位置,来开始确定主轴位置[主轴的PLCopen单位] 。 |
IN |
SlavePosition |
REAL |
凸轮内的从轴位置[从轴的PLCopen单位] 。 |
IN |
MasterFactor |
UDINT |
主轴的拉伸系数 |
IN |
SlaveFactor |
DINT |
从轴的拉伸系数 |
OUT |
Done |
BOOL |
主轴位置的确定完成 |
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须继续调用。 |
OUT |
Error |
BOOL |
执行过程中出现错误 |
OUT |
ErrorID |
UINT |
|
OUT |
MasterPosition |
REAL |
确定的主轴位置[主轴的PLCopen单位] |
表: 参数 MC_BR_GetCamMasterPosition
本节的主题: