偏移的速度轮廓曲线是在偏移开始时测量的指定主站的当前速度(指定主站为耦合的主轴,则应用模式为 "mcMASTER_POSITION_BASED +mcMASTER_POSITION",指定主站为耦合的从轴,则应用模式为 "mcMASTER_POSITION_BASED +mcSLAVE_POSITION")和功能块输入 "速度 "和 "加速度 "计算出来的。
当前的指定主站位置作为从速度轮廓曲线计算实际偏移的基础。偏移的持续时间取决于开始时测量的主站速度(轮廓计算)和当前的主站速度。
如果耦合主轴在偏移开始后加速,产生的轮廓速度将大于 "速度Velocity "输入的值。
如果指定主站的速度是恒定的,可以为 "速度 Velocity"输入一个小于主速度的值,以防止在指定负偏移时产生的速度(主速度+运动轮廓的速度)是负的。
例子(对于+mcSLAVE_POSITION,主站速度恒定)
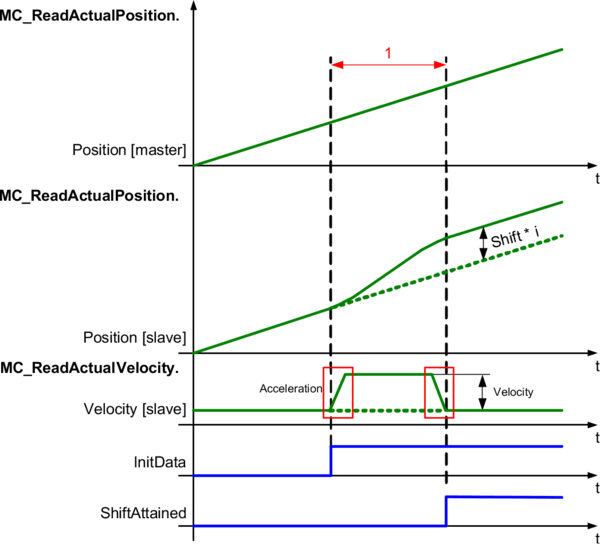
1 取决于主速度