这个功能块可以在从轴位置上叠加一个可以在 "Shift "输入上设定的偏移量(类似于 MC_Phasing,但它是在主轴位置侧产生一个相位偏移),或者可以直接在驱动器上使用 "ParID输入 "循环指定偏移量。
这个功能块可以和其他启动耦合的功能块一起使用(MC_GearIn、 MC_GearInPos、 MC_CamIn、 MC_BR_AutControl等)。
使用要求
•用于SG3/SGC目标系统的功能块名称 MC_032BR_Offset
•如果该功能块与 MC_BR_AutCommand 或 MC_BR_AutControl 功能块一起使用 ,则不能使用从轴附加轴(ParID ACP10PAR_AUT_SL_ADD_AXIS)!
允许启用该功能块的PLCopen轴状态
•Enable:所有PLCopen轴状态,对PLCopen轴状态没有影响
•开始shift偏移:仅在从轴同步运动中
功能块
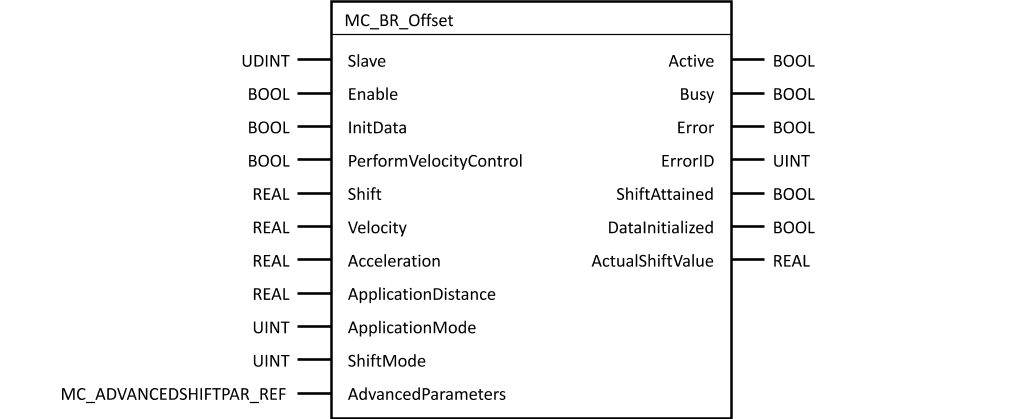
参数
输入/输出 |
参数 |
数据类型 |
说明 |
IN |
Slave |
UDINT |
从轴 轴对象引用 |
IN |
BOOL |
0 ... 没有偏移发生,"InitData = 1 "或 "PerformVelocityControl = 1 "没有作用。 1 ... 可以执行偏移。 |
|
IN |
InitData |
BOOL |
当轴处于 同步运动 状态时,在上升沿初始化驱动器上的 "偏移量"、"速度"、"加速度 "和 "应用距离 "的输入数据(取决于 "应用模式")。 |
IN |
PerformVelocityControl |
BOOL |
仅适用于 mcVELOCITY_CONTROL 应用模式下,其它模式无效 0 ... 没有启用偏移功能 1 ... 当轴处于 同步运动 状态时,在上升沿上激活偏移 。 |
IN |
Shift |
REAL |
偏移量[从轴PLCopen单位] 1 |
IN |
Velocity |
REAL |
达到偏移量的速度[从轴PLCopen单位/秒] 1 |
IN |
Acceleration |
REAL |
达到偏移量的加速度[从轴PLCopen单位/s²] 1 |
IN |
ApplicationDistance |
REAL |
发生偏移的距离 [主站的单位] 2 |
IN |
ApplicationMode |
UINT |
基于以下不同模式的的运动轮廓: mcTIME_BASED... 1 mcVELOCITY_CONTROL... 4 +奴隶的位置... 0 +mcMASTER_POSITION... 256 |
IN |
ShiftMode |
UINT |
定义了如何使用 "Shift "输入的数值: mcABSOLUTE... 0 mcRELATIVE... 1 mcABSOLUTE_NO_RESET... 2 mcRELATIVE_NO_RESET... 3 |
IN |
AdvancedParameters |
MC_ADVANCEDSHIFTPAR_REF |
使用高级功能的结构 |
OUT |
Active |
BOOL |
可以执行shift偏移 |
OUT |
Busy |
BOOL |
该功能块处于激活状态,必须继续被调用。 功能块启用 (Enable = 1) |
OUT |
Error |
BOOL |
执行过程中出现错误 |
OUT |
ErrorID |
UINT |
|
OUT |
ShiftAttained |
BOOL |
shift偏移执行完毕 |
OUT |
DataInitialized |
BOOL |
输入数据被初始化 |
OUT |
ActualShiftValue |
REAL |
驱动器上的当前移位值[从轴PLCopen单位]。 |
表: 参数 MC_BR_Offset
1 |
在耦合功能块中定义的从轴的物理单位被用于这些输入和输出。 |
2 |
如果" 应用模式 "选择了+mcSLAVE_POSITION ,则输入 "应用距离 "将使用指定从轴的物理单位。如果 "应用模式 "选择了 +mcMASTER_POSITION ,则输入 "应用距离 "使用为耦合功能块指定的主轴的物理单位。
除非耦合功能块的输入 "MasterParID" ≠ 0或输入 "AdvancedParameters.ShiftParID", 在这种情况下,计算总是使用轴的参数单位。 |
MC_ADVANCEDSHIFTPAR_REF 数据类型
参数 |
数据类型 |
描述 |
ShiftParID |
UINT |
读取相移或偏移的ParID |
MasterMaxVelocity |
REAL |
主轴的最大速度[主轴的PLCopen单位] 。 这使得在 "应用模式 " mcMASTER_POSITION_BASED 和 mcMASTER_DISTANCE_BASED中 指定用于计算偏移轮廓的速度成为可能。
注意: 如果该参数为 "0.0",则使用主轴的当前速度。 |
ActualShiftValueMode |
USINT |
输出 "ActualShiftValue "的绝对值或相对于当前相位偏移的起始值(V5.110或更高版本)。 mcABSOLUTE... 0(默认) mcRELATIVE... 1 注意: mcRELATIVE对 "ShiftParID "不起作用。 |
本节的主题: