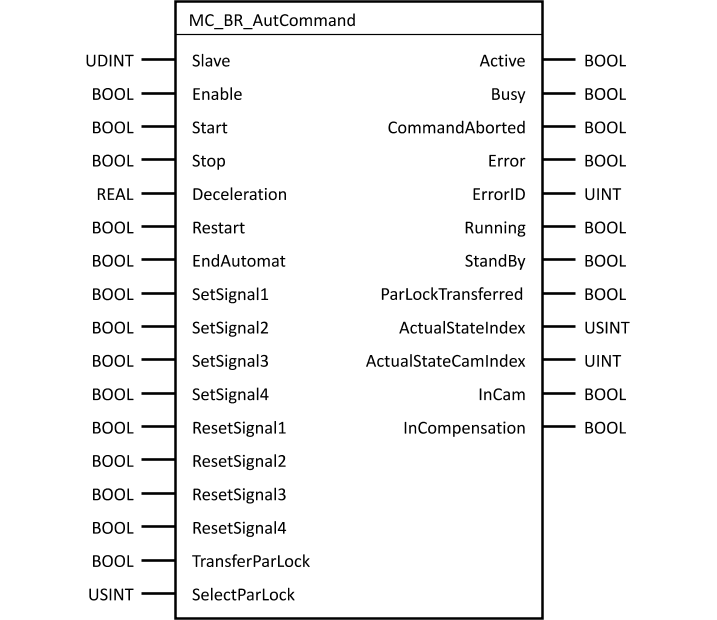
该功能块可用于操作 Cam Profile Automat。
使用要求
•用于SG3/SGC目标系统的功能块名称 MC_066BR_AutCommand
•(V2.160及更高版本) 如果从轴已经在进行基础运动,只有在启动automat时补偿模式(ncV_COMP_A_CYC)已经启用的情况下, 才能使用 MC_BR_AutCommand 或 MC_BR_AutControl 功能块中止运动。 相对主轴的起始位置也必须被设置为"-1"。
•MC_BR_AutCommand 不应该与 MC_BR_AutControl 一起使用 。
•在功能块激活时,不允许对指定的轴进行回零。
允许启用功能块的PLCopen轴状态
参数 |
允许启用功能块的PLCopen轴状态 |
||||||
"Enable = 1" |
Yes |
||||||
"Start = 1" |
Yes |
如果 同步运动 是由 MC_BR_AutCommand 引起的 |
Yes |
No |
|||
"Stop = 1" |
No |
||||||
"Restart = 1" |
No |
||||||
"EndAutomat = 1" |
Yes |
如果 同步运动 是由 MC_BR_AutCommand 引起的 |
Yes |
Yes |
|||
"SetSignal1 = 1" |
Yes |
No* |
Yes |
||||
"SetSignal2 = 1" |
|||||||
"SetSignal3 = 1" |
|||||||
"SetSignal4 = 1" |
|||||||
"ResetSignal1 = 1" |
|||||||
"ResetSignal2 = 1" |
|||||||
"ResetSignal3 = 1" |
|||||||
"ResetSignal4 = 1" |
|||||||
"TransferParLock" |
Yes |
||||||
*) |
如果没有Cam Profile Automat 在后台处于 "待机Standby "状态,则可以设置/重置信号。 |
功能块
参数
输入/输出 |
参数 |
数据类型 |
说明 |
||||||||
IN |
Slave |
UDINT |
从轴轴对象引用 |
||||||||
IN |
BOOL |
只要该输入被置位,该功能块就处于激活状态。 |
|||||||||
IN |
Startup |
BOOL |
在上升沿时启动配置的Cam Profile Automat |
||||||||
IN |
Stop |
BOOL |
在上升沿时 以配置的 "减速度 "来停止从轴的运动
注意: Cam Profile Automat 在后台继续运行,可以通过设置 "重新启动 "继续运行。 |
||||||||
IN |
Deceleration |
REAL |
最大减速度[从轴PLCopen单位/s²]
注意: 该减速度仅在 "Enable "输入的上升沿后应用。 |
||||||||
IN |
Restart |
BOOL |
在一个上升沿上重新耦合Cam Profile Automat 。
注意: 只要 "StandBy "输出被设置,一个中止的Cam Profile Automat 可以被重新启动。 |
||||||||
IN |
EndAutomat |
BOOL |
在一个上升沿上彻底停止凸轮automat ,如果运动是由 MC_BR_AutCommand启动的,则停止从轴的运动 。 注意: 然后结束automat后就不可能再重新启动Cam Profile Automat 。 |
||||||||
IN |
SetSignal1 |
BOOL |
在上升沿将信号1设置TRUE |
||||||||
IN |
SetSignal2 |
BOOL |
在上升沿将信号2设置TRUE |
||||||||
IN |
SetSignal3 |
BOOL |
在上升沿将信号3设置TRUE |
||||||||
IN |
SetSignal4 |
BOOL |
在上升沿将信号4设置TRUE |
||||||||
IN |
ResetSignal1 |
BOOL |
在上升沿重置信号1为FALSE |
||||||||
IN |
ResetSignal2 |
BOOL |
在上升沿重置信号2为FALSE |
||||||||
IN |
ResetSignal3 |
BOOL |
在上升沿重置信号3为FALSE |
||||||||
IN |
ResetSignal4 |
BOOL |
在上升沿重置信号4为FALSE |
||||||||
IN |
TransferParLock |
BOOL |
在上升沿上将在线参数更改和凸轮下载的锁定lock传输给驱动器 |
||||||||
IN |
SelectParLock |
USINT |
为在线参数更改和凸轮下载的锁定模式进行设置
注意:
|
||||||||
OUT |
Active |
BOOL |
功能块激活,可以执行运动 |
||||||||
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须继续被调用。 |
||||||||
OUT |
CommandAborted |
BOOL |
功能块被另一个功能块中止了 |
||||||||
OUT |
Error |
BOOL |
执行过程中出错 |
||||||||
OUT |
ErrorID |
UINT |
|||||||||
OUT |
Running |
BOOL |
Cam Profile Automat 运行中 |
||||||||
OUT |
StandBy |
BOOL |
Cam Profile Automat后台待机,可以用 "Restart "重新启动。 |
||||||||
OUT |
ParLockTransferred |
BOOL |
ParLock命令成功传输到驱动器 |
||||||||
OUT |
ActualStateIndex |
USINT |
当前状态的索引
注意: 即使功能块报告为 "待机StandBy"且没有其它耦合功能块处于活动状态,也会输出活动状态索引。 |
||||||||
OUT |
ActualStateCamIndex |
UINT |
当前状态的凸轮数据的索引CamIndex
注意: 即使功能块报告为 "待机StandBy"且没有其它耦合功能块处于活动状态,活动的凸轮索引也会被输出。 |
||||||||
OUT |
InCam |
BOOL |
当前状态的凸轮cam处于活动状态
注意: 即使功能块报告为 "待机StandBy"且没有其它耦合功能块处于活动状态,也会输出凸轮的当前状态。 |
||||||||
OUT |
InCompensation |
BOOL |
当前状态的补偿激活
注意: 即使功能块报告为 "待机StandBy"且没有其它耦合功能块处于活动状态,也会输出补偿的当前状态。 |
表: 参数 MC_BR_AutCommand
本节的主题